Nœud Shortest Edge Paths
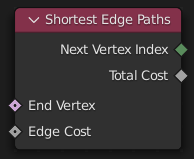
Le noeud Shortest Edge Paths trouve des chemins le long des arêtes du maillage vers une sélection de sommets d’extrémité. Le coût utilisé pour définir “le plus court” peut être défini sur n’importe quoi. Par défaut, il y a un coût constant pour chaque arête, mais une entrée typique serait la longueur de chaque arête.
La sortie est codée avec des indices de sommet et est destinée à être utilisée sur le domaine de sommet. Pour chaque sommet, la sortie Next Vertex Input stocke l’index du sommet suivant dans le chemin vers le point de terminaison “le plus proche”.
Le nœud est implémenté avec Dijkstra’s algorithm (l’algorithme de Dijkstra.).
Astuce
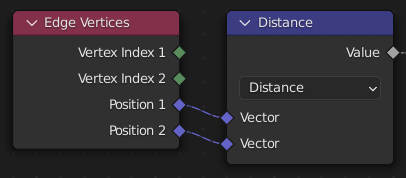
La longueur d’une arête est une donnée naturelle de Edge Cost. Peut être implémenté avec le Nœud Edge Vertices et le Nœud Vector Math réglé sur l’opération Distance.
Voir aussi
Ce nœud peut être utilisé avec le Nœud Paths to Selection ou le Nœud Edge Paths to Curves pour générer une nouvelle géométrie basée sur les chemins.
Entrées
- End Vertex
Une sélection des sommets de l’objectif qui terminent le chemin d’arêtes.
- Edge Cost
Le poids de chaque arête, utilisé pour déterminer la signification de “shortest” (le plus court).
Propriétés
Ce nœud n’a pas de propriétés.
Sorties
- Next Vertex Index
Le sommet suivant sur le chemin le plus court entre chaque sommet et l’extrémité la plus proche (tel que défini par le coût d’entrée).
- Total Cost
Le coût restant avant qu’un sommet de fin ne soit atteint en suivant les indices des sommet suivants.