Introduction¶
Cloth simulation is one of the hardest aspects of computer graphics, it is a deceptively simple real-world item that is taken for granted, but it actually has very complex internal and environmental interactions. Cloth is commonly modeled as 2D mesh to simulate real world objects such as fabrics, flags, banners. And yet cloth can also be used to model 3D objects such as teddy bears, pillows, balloons, or balls.
Cloth interacts with and is affected by other moving objects, the wind and other forces, as well as a general aerodynamic model, all of which is under your control.

Exemple de tissu.¶ |
Tissu sur des hommes de bois gravé (par motorsep).¶ |

Exemple de tissu.¶ |
Once Cloth physics have been added to a mesh, a Cloth modifier will be added to the object’s modifier stack. As a modifier then, it can interact with other modifiers, such as Armature and Smooth. In these cases, the ultimate shape of the mesh is computed in accordance with the order of the modifier stack. For example, you should smooth the cloth after the modifier computes the shape of the cloth.
Vous pouvez appliquer le modificateur Cloth pour figer, ou verrouiller, la forme du maillage dans cette trame, ce qui supprime le modificateur. Par exemple, vous pouvez draper un tissu plat sur une table, et laisser la simulation se lancer, et appliquer ensuite le modificateur. Dans ce sens, vous utilisez le simulateur pour vous épargner beaucoup de temps de modélisation.
Les résultats de la simulation sont enregistrés dans un cache, de sorte que la forme du maillage, une fois calculée pour une trame dans une animation, ne doit pas être recalculée une nouvelle fois. Si des modifications de la simulation sont effectuées, vous avez un contrôle total sur l’effacement du cache et un nouveau lancement de la simulation. Le lancement de la simulation la première fois est complètement automatique et aucun précalcul ou étape distincte interrompt le flux de travail.
Le calcul de la forme du tissu à chaque trame est automatique et exécuté en arrière-plan : ainsi vous pouvez continuer à travailler pendant que la simulation est calculée. Cependant, c’est un processus exigeant en ressources CPU et dépendant de la puissance de votre PC et de la complexité de la simulation. La puissance CPU nécessaire au calcul du maillage est variable, tout comme le ralentissement que vous pouvez remarquer.
Note
Do Not Jump Ahead
Si vous montez une simulation de tissu mais que Blender n’a pas calculé les formes pendant la durée de la simulation, et si vous sautez en avant de beaucoup de trames dans votre animation, il se peut que le simulateur de tissu ne soit pas capable de calculer ou de vous afficher une forme de maillage précis pour cette trame, s’il n’a pas calculé auparavant la forme pour la(les) trame(s) précédente(s).
Flux de travail¶
Une procédure générale de travail avec un tissu est :
Modéliser l’objet cloth comme une forme générale de départ.
Désigner l’objet comme « cloth » dans l’onglet Physics de l”éditeur Propriétés.
Modélisez d’autres objets de déflexion qui interagiront avec le tissu. Assurez-vous que le Modificateur Deflection soit le dernier sur la pile des modificateurs, après tout autre modificateur de déformation de maillage.
Éclairer le tissu et assigner les matériaux et les textures, UV-unwrapping si besoin.
Si besoin, attribuer à l’objet des particules, telles que la vapeur sortant de la surface.
Run the simulation and adjust settings to obtain satisfactory results. The Timeline editors playback controls are great for this step.
Facultativement vieillir le maillage dans la simulation dans une certaine mesure pour obtenir une nouvelle forme de départ par défaut.
Faire des éditions mineures du maillage sur une base image-par-image pour corriger des déchirures mineures.
Astuce
To avoid unstable simulation, make sure that the cloth object does not penetrate any of the deflection objects.
Springs¶
Internally, cloth physics is simulated with virtual springs that connect the vertices of a mesh. There are four types of springs that control how the cloth bends. These four types are defined below and illustrated in the following image:
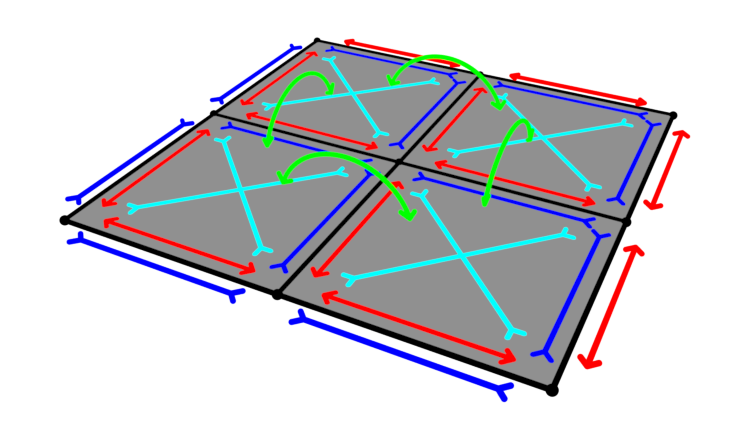
Illustration of cloth springs; tension springs (blue), compression springs (red), shear springs (cyan), and angular bending springs (green).¶
- Tension Springs
Control the stiffness of the cloth.
- Compression Springs
Control the amount of force required to collapse or compress the cloth.
- Shear Springs
Like compression springs but it controls the angular deformation.
- Angular Bending Springs
Control how resilient the cloth is to folding or crumpling.
All four of these spring types can be controlled independently in the Physical Properties panel. While these settings control surface springs, optionally, internal springs can be used for 3D meshes and behave similarly to Soft Bodies.