Collisions¶
Dans la plupart des cas, une pièce de tissu ne peut pas simplement pendre comme cela dans l’espace 3D, elle entre en collision avec d’autres objets dans l’environnement. Pour vous assurer d’une simulation correcte, Il y a plusieurs éléments qui doivent être installés et fonctionner ensemble :
L’objet Cloth doit être informé de participer aux collisions.
Facultativement (mais recommandé) indiquez au tissu d’entrer en collision avec lui-même.
Les autres objets doivent être visibles pour l’objet Cloth via les calques partagés.
Les autres objets doivent être des objets mesh.
Les autres objets peuvent se déplacer ou être déformés eux-mêmes par d’autres objets (comme une armature ou une clé de forme).
Les autres objets mesh doivent être informés de dévier l’objet Cloth.
Le fichier blend doit être enregistré dans un dossier de sorte que les résultats de la simulation puissent être sauvegardés.
Vous précalculez (Bake) alors la simulation. Le simulateur calcule la forme du tissu pour une plage de trames.
Vous pouvez alors éditer les résultats de simulation, ou faire des ajustements au maillage du tissu, dans des trames spécifiques.
Vous pouvez faire des ajustements de l’environnement ou des objets de déformation, et ensuite relancer la simulation de tissu à partir de la trame courante.
Réglages de collision¶
Référence
- Panneau
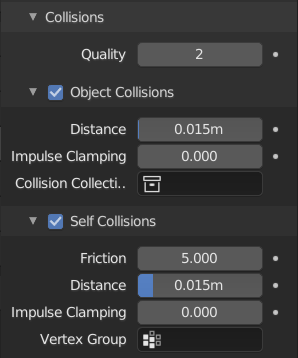
Panneau Cloth Collisions.¶
Vous devez maintenant indiquer à l’objet Cloth que vous voulez qu’il participe aux collisions. Pour l’objet Cloth, repérez le panneau Cloth Collision.
- Quality
Un réglage général du niveau de finesse et de qualité de simulation que vous souhaitez. Des nombres élevés prennent plus de temps mais garantissent moins de déchirures et de pénétrations à travers le tissu.
Object Collisions¶
Si l’objet cloth doit être dévié par un autre objet. Pour dévier un tissu, l’objet doit être activé comme un objet qui entre en collision avec l’objet en tissu. Pour permettre aux objets d’entrer en collision avec des objets en tissu, activez physique des collisions pour l’objet qui entre en collision (pas sur l’objet cloth).
Note
Si votre objet de collision n’est pas un objet mesh, comme une surface NURBS, ou un objet texte, vous devez le convertir en un objet mesh en utilisant Convert To.
- Distance
La distance qu’un autre objet doit atteindre pour que la simulation puisse repousser le tissu. Des valeurs plus petites peuvent donner des erreurs mais donnent une certaine accélération alors que des valeurs plus grandes donneront des résultats irréalistes si elles sont trop grandes et peuvent être lentes. Il est préférable de trouver une bonne valeur intermédiaire.
- Impulse Clamping
Prévient les explosions dans les situations de collision serrées et compliquées en limitant la quantité de mouvement après une collision.
- Collision Collection (Collection de collision)
Seuls les objets qui font partie de cette Collection peuvent entrer en collision avec le tissu. Notez que ces objets doivent également avoir la physique de collision activée.
Self-Collisions¶
Un vrai tissu ne peut pas se pénétrer lui-même, donc vous voulez normalement que le tissu puisse entrer en collision avec lui-même. Activez cette option pour indiquer à l’objet en tissu qu’il ne doit pas se pénétrer lui-même. Cela augmente le temps de calcul de la simulation, mais donne des résultats plus réalistes.
Astuce
Un drapeau, vu de loin, n’a pas besoin que cette option soit activée, mais un gros plan d’une cape ou d’un chemisier sur un personnage devrait avoir cette option activée.
- Friction
Coefficient indiquant à quel point le tissu est glissant lorsqu’il entre en collision avec lui-même. Par exemple, la soie a un coefficient de frottement plus faible que le coton.
- Distance
À cette distance, le tissu commence à se repousser. Des valeurs plus petites peuvent donner des erreurs mais donnent une certaine accélération alors que des valeurs plus grandes donneront des résultats irréalistes si elles sont trop grandes et peuvent être lentes. Il est préférable de trouver une bonne valeur entre les deux.
- Impulse Clamping
Prévient les explosions dans les situations de collision serrées et compliquées en limitant la quantité de mouvement après une collision.
- Vertex Group
Seuls les sommets qui font partie de ce Groupe de sommets peuvent entrer en collision les uns avec les autres.
Voir aussi
Exemple d’un fichier blend : Autocollisions de tissu <https://wiki.blender.org/wiki/File:Cloth-regression-selfcollisions.blend>`__.
Résolution de problèmes¶
Si vous rencontrez des problèmes avec la détection des collisions, il existe quelques moyens de les résoudre :
La solution la plus rapide consiste à augmenter la Distance pour les collisions objet/soi. Ce sera le moyen le plus rapide de réparer le clipping ; cependant, il sera moins précis et n’aura pas l’air aussi bon. L’utilisation de cette méthode tend à donner l’impression que le tissu repose sur l’air, et lui donne un aspect très arrondi.
Une deuxième méthode consiste à augmenter la Quality (dans le panneau Cloth). Cela permet de réduire les étapes pour le simulateur et donc d’augmenter la probabilité que les collisions rapides soient capturées. Vous pouvez également augmenter la Quality des collisions pour effectuer plus d’itérations afin de résoudre les collisions.
Si aucune de ces méthodes ne vous aide, vous pouvez facilement éditer le résultat mis en cache/précalculé en Mode Édition par la suite.
Si le tissu est déchiré par le maillage déformant, augmentez les réglages de rigidité.