Camera
Ce panneau contient tous les paramètres de la caméra utilisée pour filmer le film en cours de montage dans l’éditeur de clips. Différents paramètres prédéfinis peuvent être utilisés ici et peuvent être choisis à partir de l’en-tête du panneau. Mais des paramètres tels que les coefficients de distorsion et le point principal ne sont pas inclus dans les préréglages et doivent être remplis même si les préréglages de la caméra sont utilisés.
- Sensor Width
Est la largeur du capteur CCD dans la caméra. Cette valeur se trouve dans les spécifications de la caméra.
- Pixel Aspect
Est le format de pixel du capteur CCD. Cette valeur se trouve dans les spécifications de la caméra, mais on peut aussi la deviner. Par exemple, vous savez que la séquence doit être en 1920×1080, mais les images elles-mêmes sont en 1280×1080. Dans ce cas, l’aspect du pixel est : 1920 / 1280 = 1.5.
Lens
- Focal Length (Longueur focale)
Se passe d’explication, c’est la longueur focale avec laquelle le film a été tourné. Elle peut être réglée en millimètres ou en pixels.
- Optical Center
C’est le centre optique de l’objectif utilisé dans l’appareil photo. Dans la plupart des cas, il est égal au centre de l’image, mais il peut être différent dans certains cas particuliers. Vérifiez les spécifications de l’appareil/objectif dans ces cas.
Astuce
Centre Optique également connu sous le nom de point principal en photogrammétrie.
- Set Center
Voir Set Principal to Center.
- Lens Distortion
Fonction mathématique pour convertir les coordonnées déformées en coordonnées non déformées.
- Polynomial
Distorsion radiale polynomiale. Utilise trois coefficients de distorsion : K1, K2 et K3.
- Division
Il définit des distorsions élevées, ce qui fait que ce modèle convient beaucoup mieux aux caméras avec des objectifs de type fisheye. Utilise deux coefficients de distorsion : K1, K2.
- Nuke
Modèle de distorsion utilisé par le compositeur Nuke. Utilisez deux coefficients de distorsion K1, K2.
- Brown
Brown-Conrady est l’un des modèles mathématiques de distorsion d’objectif les plus avancés. Utilisé pour modéliser à en même temps la distorsion radiale et tangentielle. Peut utiliser jusqu’à quatre coefficients de distorsion radiale : K1-K4 et jusqu’à deux coefficients de distorsion tangentielle : P1 et P2.
- Coefficients
Les coefficients sont utilisés pour compenser la distorsion de l’objectif lors du tournage du film. Actuellement, ces valeurs ne peuvent être modifiées qu’à la main (il n’existe pas encore d’outils de calibrage) à l’aide des outils disponibles en mode Distorsion. Pour cela, il faut régler K1 jusqu’à ce que la résolution soit la plus précise pour la distance focale connue (mais il faut aussi tenir compte de la grille et des annotations pour éviter une distorsion “impossible”).
- Coefficients de Distorsion Radiale (K1-K4)
Les coefficients des modèles de distorsion d’objectif fonctionnent indépendamment les uns des autres. Les valeurs positives donneront une distorsion en barillet tandis que les valeurs négatives donneront une distorsion en coussinet. Avec un mélange de coefficients négatifs et positifs, vous pouvez définir des distorsions de moustache plus compliquées ou d’autres distorsions complexes, qui sont moins courantes mais pas rares.
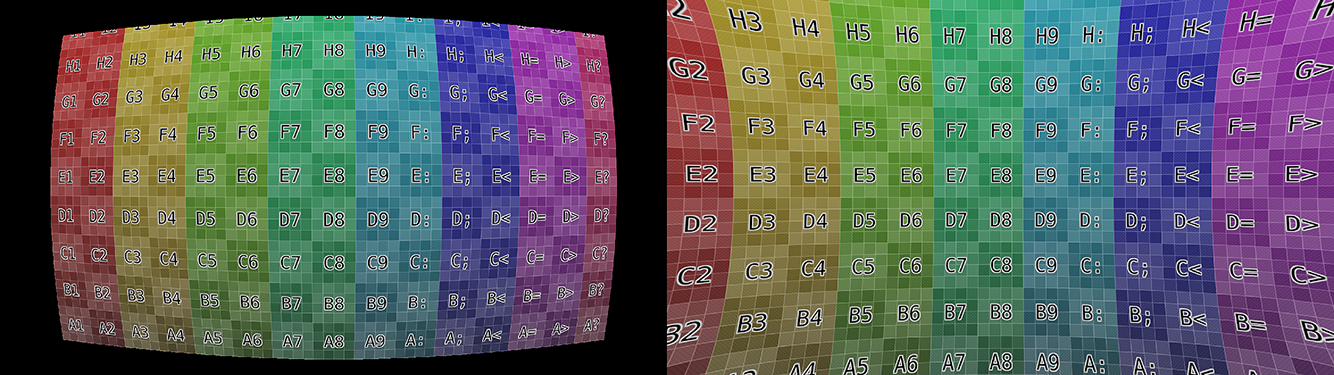
Exemple de distorsion radiale pour les coefficients K positifs et négatifs.
- Coefficients de Distorsion Tangentielle (P1, P2)
Fonctionne indépendamment et permet de compenser les situations où le capteur n’est pas perpendiculaire à un groupe d’objectifs. Le centre optique (également appelé point principal) sera décalé (déformé) du centre du capteur. P1 est utilisé pour compenser la rotation du capteur dans les axes Z (verticaux), tandis que P2 sert à compenser la rotation du capteur dans les axes X (horizontaux). De telles distorsions peuvent être trouvées dans les sources des caméras avec un système de stabilisation de capteur.
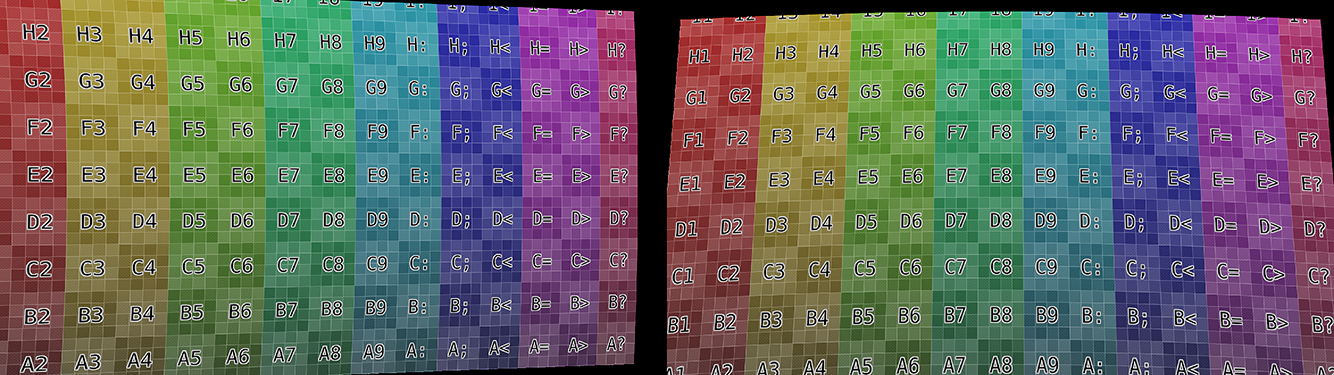
Exemple de distorsion tangentielle pour les coefficients P.