Вступ – Introduction¶
Симуляція тканини це один з найважчих аспектів комп’ютерної графіки, оскільки це оманливо простий елемент з реального світу, котрий вважається сам собою зрозумілим, але насправді має дуже складні внутрішні та середовищні взаємодії. Тканина зазвичай моделюється як 2D сіті для симулювання об’єктів реального світу, таких як тканини, прапори, банери. А ще тканина може також використовуватися для моделювання таких 3D об’єктів, як плюшеві ведмедики, подушки, повітряні кулі або м’ячі.
Тканина взаємодіє іншими рухомими об’єктами та задіюється ними, вітром та іншими силами, а також загальною аеродинамічною моделлю, і цим всім ви можете керувати.

Приклад симуляції тканини.¶ |
Тканина на різьблених дерев’яних чоловічках (зроблено митцем motorsep).¶ |

Приклад симуляції тканини.¶ |
Як тільки фізика типу Cloth додана на сіть, модифікатор – modifier з назвою Cloth буде доданий у стек модифікаторів для об’єкта. Як модифікатор, тоді, він може взаємодіяти з іншими модифікаторами, такими як Armature та Smooth. У таких випадках, остаточна форма сіті обчислюється у відповідності до порядку стеку модифікаторів. Наприклад, ви повинні згладжувати тканини після того, як тканинний модифікатор обчислить її форму.
Ви можете Застосувати – Apply модифікатор Cloth для зафіксування або закарбування форми сіті у певному кадрі симуляції, і це вилучає цей модифікатор зі стека. Наприклад, ви можете накрити тканинною площиною стіл, запустити симуляцію та у потрібному місці застосувати модифікатор тканини. У такому вигляді ви можете використовувати тканинний симулятор з метою заощадження часу для моделювання.
Результати симуляції зберігаються у кеші, а тому форма сіті, вже один раз обчислена у певному кадрі анімації, не потребує повторних обчислень до моменту її зміни. Якщо зроблені зміни симуляції, то ви можете повністю очистити кеш та повторно запустити симуляцію. Запуск імітації на перший раз є повністю автоматичним та не потребує запікання або окремих кроків, що переривають робпотік.
Обчислення форми тканини у кожному кадрі є автоматичним та робиться у фоновому режимі, а тому ви можете продовжувати працювати над сценою під час обчислення симуляції. Проте, це інтенсифікує роботу Центрального Процесора та залежно від потужності вашого ПК і складності самої симуляції, може потребуватися значний час для обчислення змін сіті, а також можуть з’явитися помітні вами запізнення в інтерфейсі.
Примітка
Не забігайте наперед
Якщо ви уклали симуляцію тканини, але Blender ще не обчислив її форми у ході симуляції, та, якщо ви перейдете вперед на багато кадрів по вашій анімації, то імітатор тканини може не бути у змозі обчислити або показати вам точну форму сіті у такому кадрі, якщо ще не обчислено її форму у попередніх кадрі(ах).
Робпотік – Workflow¶
Загальний процес для роботи з тканиною є наступним:
Змоделюйте звичайним чином тканинний об’єкт у загальній стартовій формі.
Designate the object as a «cloth» in the Physics tab of the Properties.
Змоделюйте інші об’єкти відхилення, що будуть взаємодіяти з тканиною. Переконайтеся, що модифікатор «Тканина» – Cloth розташований останнім у стеку модифікатора, після всіх інших деформувальних модифікаторів для сіті.
Освітіть цю тканину, при потребі розгорніть її поверхню по UV, та призначте для неї матеріали та текстури.
За бажанням додайте для цього об’єкта систему частинок, що наприклад, симулює випаровування пари з тканинної поверхні.
Запустіть програвання симуляції та наладнайте устави для отримання задовільних результатів. Керувальники програвання у редакторах, що мають Часолінію, чудово підходять цього кроку.
Факультативно зафіксуйте (застосуйте модифікатор) у певному моменті симуляції для отримання нової стандартної стартової форми.
Зробіть дрібні редагування для сіті кадр-за-кадром з метою корекції незначних огріхів.
Порада
Для уникання нестабільної симуляції переконайтеся, що об’єкт тканини не проникає та не перетинається з іншими об’єктами відхилення.
Пружності – Springs¶
Внутрішньо, фізика тканини симулюється за допомогою віртуальних пружин, що з’єднують вершини сіті. Існують чотири типи пружностей, що керують тим, як тканина згинається. Ці чотири типи визначаються нижче та проілюстровані на наступному зображенні:
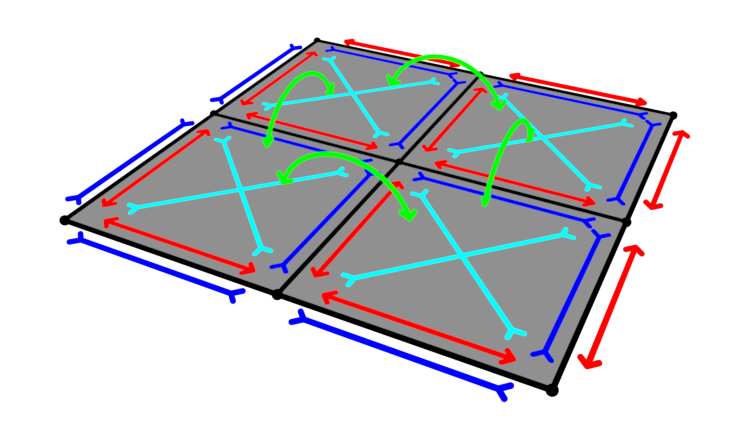
Ілюстрація пружностей тканини; пружності натягу (сині), пружності стиснення (червоні), пружності косування (блакитні) та пружності кутового згинання (зелені).¶
- Пружності Натягу – Tension Springs
Керують тугістю тканини.
- Пружності Стиснення – Compression Springs
Керують величиною сили, що вимагається для стягнення або стискання тканини.
- Пружності Косування – Shear Springs
Як і пружності стиснення, але це керує кутовою деформацією.
- Пружності Кутового Згинання – Angular Bending Springs
Керують тим, наскільки пружна тканина до згортування або зморщування.
Всі ці чотири типи пружностей можуть керуватися незалежно у панелі Фізичні Властивості – Physical Properties. У той час як ці устави керують пружностями поверхні, факультативно, внутрішні пружності можуть використовуватися для 3D сітей та поводяться аналогічно як Soft Bodies.