Transformation Constraint – Примус «Трансформація»¶
Цей примус є складнішим та універсальнішим, ніж інші примуси «трансформ». Він дозволяє вам розкладати один тип властивостей трансформ (тобто локація, обертання чи масштаб) цілі на такий самий або інший тип властивостей трансформ володільця в межах заданого діапазону значень (який може бути різним для кожної властивості цілі та володільця). Ви можете також перемикатися між осями та використовувати значення діапазонів не як ліміти, а як «маркери» для визначення розкладання між увідними (ціль) та вивідними (володілець) значеннями.
Тож, наприклад, ви можете використати позицію цілі вздовж осі X для керування обертанням володільця навколо осі Z, зазначивши, що одиниця вздовж осі X цілі відповідає 10 одиницям навколо осі Z володільця. Типові використання цього включають передачі (дивіться примітку нижче) та обертання на основі укладів локації.
Options – Опції¶
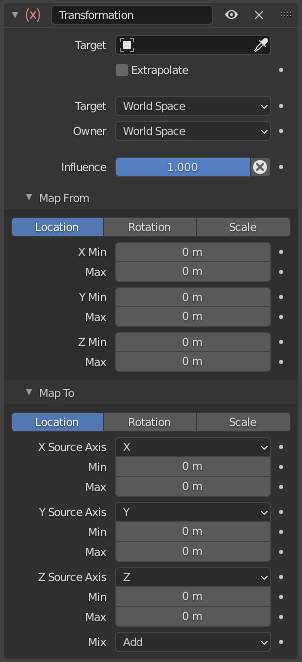
Панель для Transformation.¶
- Target – Ціль
Поле Ідентифікатор Даних — Data ID використовується для вибору цілі для примусу, і поки вона не вибрана, то примус буде не функціональним (фон поля імені буде забарвлений червоним). Дивіться для отримання додаткової інформації про common constraint properties.
- Extrapolate – Екстраполювання
Стандартно значення Min та Max обмежують увідні та вивідні значення; всі значення поза цими діапазонами відсікаються до них. Коли ви вмикаєте цю кнопку, то значення Min та Max більше не є суворими лімітами, а скоріше «маркерами», що визначають пропорційне (лінеарне) розкладання між увідними та відповідними вивідними значеннями. Проілюструймо це за допомогою двох графів на Ілюстрації Принципи цього Екстраполювання.. На цих картинках діапазон уводу (по абсцисі) задано як (1.0 до 4.0), а його відповідний діапазон виводу (по ординаті) – як (1.0 до 2.0). Жовта крива представляє розкладання між уводом та виводом.
Принципи цього Екстраполювання.¶ 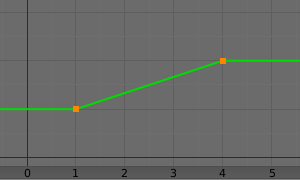
Екстраполювання вимкнене: вивідні значення обмежені всередині діапазону (1.0 to 2.0).¶
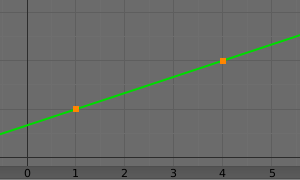
Екстраполювання увімкнене: вивідні значення є «вільними» пропорційно слідувати увідним.¶
- Target/Owner – Ціль/Володілець
Стандартна конверсія між просторами. Для отримання додаткової інформації дивіться common constraint properties.
- Influence – Вплив
Керує відсотком впливу, який цей примус має на об’єкт. Дивіться докладніше common constraint properties.
Map From – Розкладка Із¶
Містить увідні устави (від цілі).
- Location, Rotation, Scale – Локація, Обертання, Масштаб
Ці радіокнопки дозволяють вам вибрати, який тип властивості використовувати.
- Mode (Rotation) – Режим (Обертання)
Дозволяє визначати тип обертання на уводі, включаючи різні порядки за Ейлером – Euler, кватерніон – Quaternion та інші режими каналу обертання Rotation Channel Modes. Стандартним є використовування порядку за Ейлером – Euler для володільця примуса.
У режимі Quaternion ці канали конвертуються у виважені кути так само, як кути гойдання режимів Swing and X/Y/Z Twist.
- X/Y/Z Min, Max – Мін, Макс
Незалежно для кожної осі (X, Y та Z) поля чисел мінімуму та максимуму керують нижньою та верхньою межами увідного діапазону значень. Зауважте, що якщо мінімальне значення є вищим, ніж відповідне йому максимальне значення, то цей примус поводиться, ніби він має як мінімальне таке саме значення, як і максимальне.
Map To – Розкладка Для¶
Містить устави виводу (володілець).
- Location, Rotation, Scale – Локація, Обертання, Масштаб
Ці три радіокнопки дозволяють вам вибрати тип властивості для керування ним.
- Order (Rotation) – Порядок (Обертання)
Для обертання дозволяє визначати, який порядок за Ейлером – Euler використовувати під час обчислення примуса. Стандартним є використовування порядку володільця примуса.
- X/Y/Z Source Axis – Вісь Джерела
Ці три вибірники осей дозволяють вам вибирати, яку увідну вісь розкладати, відповідно (зверху вниз) на вивідні (володільця) X, Y та Z осі.
- Min, Max – Мін, Макс
Поля чисел Min та Max керують нижніми та верхніми межами вивідного діапазону значень, незалежно для кожної розкладеної осі. Зауважте, що якщо мінімальне значення є вищим, ніж відповідне йому максимальне значення, то цей примус поводиться, ніби він має як мінімальне таке саме значення, як і максимальне.
- Mix – Мішання
Визначає, як результат цього примуса комбінується з наявною трансформацією. Набір доступних варіантів варіюється на основі типу цієї трансформації.
- Replace – Заміна
Результат цього примусу замінює наявну трансформацію.
- Multiply (Scale) – Множення (Масштаб)
Нові значення множаться на наявні значення осей.
- Add (Location, Rotation) – Додання (Локація, Обертання)
Нові значення додаються до наявних значень осей.
- Before Original (Rotation) – Перед Оригіналом (Обертання)
Нове обертання додається перед наявним обертанням, ніби воно було застосоване до предка володільця примусу.
- After Original (Rotation) – Після Оригіналу (Обертання)
Нове обертання додається після наявного обертання, ніби воно було застосоване до нащадка володільця примусу.
Примітка
З історичних причин, режим Mix стандартно задано як Add для локації та обертання та як Replace для масштабування.
При використовуванні властивостей трансформи обертання цілі як уводу, якими б реальними значення не були, примус буде завжди «повертати їх» у діапазон (-180 до 180). Наприклад, якщо ціль має обертання на 420 градусів навколо її осі X, то значення, використовувані цим примусом як увід X, будуть:
\(((420 + 180) modulo 360) - 180 = 60 - ...\)
Ось чому цей примус реально не підходить для шестерень, приводів!
Подібно, коли масштабові властивості трансформування цілі використовуються як увід, то незалежно від наявних реальних значень, примус завжди буде приймати їх абсолютні значення (тобто, інвертувати від’ємні у додатні).
Коли мінімальне min значення є вищим, ніж відповідне йому максимальне max, то обидва вони вважаються рівними максимальному max значенню. Це означає, що ви не можете створювати «розвернені» розкладання…