Vynútenie Transformácia
Toto vynútenie je zložitejšie a univerzálnejšie ako ostatné vynútenia „transformácie“. Umožňuje priradiť jeden typ transformačných vlastností (t. j. polohu, rotáciu alebo mierku) cieľa na rovnaký alebo iný typ transformačných vlastností vlastníka v rámci daného rozsahu hodnôt (ktorý môže byť pre každý cieľ a vlastníka iný). Môžete tiež prepínať medzi osami a používať hodnoty rozsahu nie ako limity, ale skôr ako „značky“ na definovanie priradenia medzi vstupnými (cieľovými) a výstupnými (vlastníkovými) hodnotami.
Takže napr. polohu cieľa pozdĺž osi X môžete použiť na riadenie rotácie vlastníka okolo osi Z, pričom 1 jednotka pozdĺž osi X cieľa zodpovedá 10 jednotkám okolo osi Z vlastníka. Typické použitia pre zahrnuté mechanizmy (pozri poznámku nižšie) a rotáciu na základe nastavenia polohy.
Možnosti
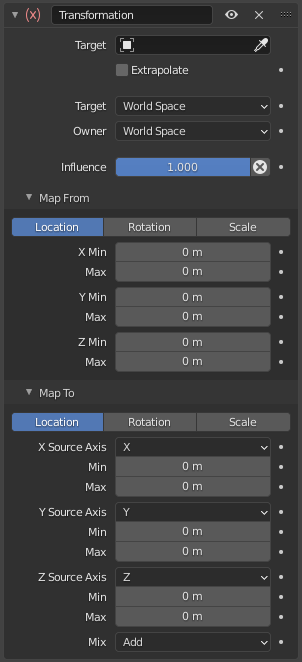
Panel Transformácia.
- Cieľ
ID údaje sa používajú na výber cieľa vynútení a nie sú funkčné (červený stav), ak nemá žiadne. Viac informácií nájdete v časti všeobecné vlastnosti vynútenia.
- Extrapolovať
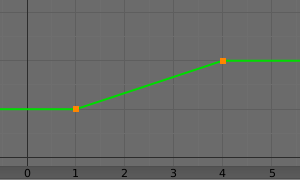
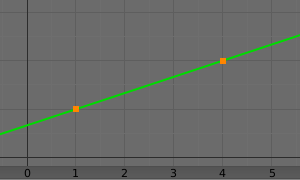
Predvolené hodnoty Min a Max ohraničujú vstupné a výstupné hodnoty; všetky hodnoty mimo týchto rozsahov sú orezané na tieto hodnoty. Keď zapnete toto tlačidlo, hodnoty Min a Max už nebudú striktnými hranicami, ale skôr „značkami“ definujúcimi proporcionálne (lineárne) mapovanie medzi vstupnými a zodpovedajúcimi výstupnými hodnotami. Ilustrujme si to na dvoch grafoch obr. fig-constraints-transformation-extrapolate. Na týchto obrázkoch je vstupný rozsah (na vodorovnej osi X) nastavený na (1,0 až 4,0) a zodpovedajúci výstupný rozsah (na zvislej osi Y) na (1,0 až 2,0). Žltá krivka predstavuje mapovanie medzi vstupom a výstupom.
- Cieľ/Vlastník
Štandardná konverzia medzi medzerami. Pre viac informácií si pozrite časť všeobecné vlastnosti vynútenia.
- Vplyv
Ovláda percento vplyvu vynútenia na objekt. Viac informácií nájdete v časti všeobecné vlastnosti vynútenia.
Priradiť z
Obsahuje vstupné nastavenia (z cieľa).
- Poloha, Rotácia, Mierka
Prepínačmi môžete vybrať typ vlastnosti, ktorý sa má použiť.
- Režim (rotácia)
Povolí určiť typ vstupnej rotácie, ktorá sa má použiť, vrátane rôznych Eulerových poradí, Štvorice a iné režimy kanálov rotácie. Predvolene sa používa Eulerovo poradie vlastníka vynútenia.
V režime Kvaternión sa kanály konvertujú na vážené uhly rovnakým spôsobom ako uhly výkyvu v režimoch Výkyv a Zakrútenie X/Y/Z.
- X/Y/Z Min, Max
Nezávisle na každej osi (X, Y a Z) sa pomocou číselných polí min a max určuje dolná a horná hranica rozsahu vstupných hodnôt. Všimnite si, že ak je hodnota min vyššia ako jej zodpovedajúca hodnota max, obmedzenie sa správa, ako keby malo rovnakú hodnotu ako hodnota max.
Namapovať na
Obsahuje nastavenia výstupu (pre vlastníka).
- Poloha, Rotácia, Mierka
Tri prepínacie tlačidlá umožňujú vybrať typ vlastnosti, ktorú chcete ovládať.
- Poradie (rotácia)
Pre rotáciu umožňuje určiť, ktorý Eulerovo poradie sa má použiť pri vyhodnocovaní vynútenia. Predvolene sa použije poradie vlastníka vynútenia.
- Zdrojová os X/Y/Z
Tri voliče osí umožňujú vybrať, ktorá vstupná os sa má priradiť na výstupné osi (vlastníka) X, Y a Z (zhora nadol).
- Min, Max
Číselné polia Min a Max určujú dolnú a hornú hranicu rozsahu výstupných hodnôt, nezávisle pre každú mapovanú os. Všimnite si, že ak je hodnota min vyššia ako jej zodpovedajúca hodnota max, vynútenie sa správa, ako keby malo rovnakú hodnotu ako hodnota max.
- Zmiešať
Určuje, ako sa výsledok vynútenia kombinuje s existujúcou transformáciou. Súbor dostupných možností sa líši v závislosti od typu transformácie.
- Nahradiť
Výsledok vynútenie nahradí existujúcu transformáciu.
- Vynásobiť (mierka)
Nové hodnoty sa vynásobia existujúcimi hodnotami osi.
- Spočítať (poloha, rotácia)
Nové hodnoty sa pripočítajú k existujúcim hodnotám osi.
- Pred originálom (rotácia)
Nová rotácia sa pridá pred existujúcu rotáciu, ako keby bolo použité na rodiča vlastníka vynútenia.
- Po origináli (rotácia)
Nová rotácia sa pridá za existujúcu rotáciu, ako keby bola použitá na potomka vlastníka vynútenia.
Poznámka
Z historických dôvodov je predvolené nastavenie režimu Zmiešať na Spočítať pre polohu a rotáciu a Nahradiť pre mierku.
Ak ako vstup použije vlastnosti transformácie rotácie cieľa, bez ohľadu na skutočné hodnoty ich vynútenie vždy „vráti“ do rozsahu (-180 až 180). Napr. ak má cieľ rotáciu 420 stupňov okolo osi X, hodnoty použité ako vstup X vynútením budú:
Preto toto vynútenie nie je vhodné pre ozubené kolesá!
Podobne pri použití vlastností transformácie mierky cieľa ako vstupu, nech sú skutočné hodnoty akékoľvek, vynútenie vždy prevezme ich absolútne hodnoty (t. j. invertuje záporné hodnoty).
Ak je hodnota min vyššia ako príslušná hodnota max, obe sa považujú za rovné hodnote max. Z toho vyplýva, že nemôžete vytvárať „reverzné“ priradenia…