四肢#
这些装配器类型处理不同类型的四肢及其特征,如手指。
limbs.simple_tentacle (触角-简单型)#
Will create a simple bendy and stretchy b-bones tentacle chain, which can optionally replicate local rotation from preceeding bones to the subsequent ones for use in cases like fingers.
要求:由至少两块连接的骨骼组成的链条。
- X/Y/Z轴
Enables the automation on the selected axis. Multiple axis or none can be selected holding Shift-LMB. When enabled the subsequent control bones will copy the local rotations from the previous ones. The option is accessible in the controls of the final rig as a Copy Rotation constraint and can be disabled even after rig is generated, or at animation time.
- 指定
If enabled, allows placing the Tweak controls in different bone collections from the main controls.
limbs.super_finger#
Will create a bendy and stretchy finger chain with a master control bone that controls the rotation of all joints through its scale.
要求:由至少两块连接的骨骼组成的链条。
- 混合旋转轴 (自动, X, Y, Z, -X, -Y, -Z)
定义链接到主骨骼比例的自动旋转轴。
- 柔性骨骼段 (整数)
定义每个微调控件将拆分为的骨段数。
- IK控制
只用一个控件生成的一个非常简单的IK机制。
IK以FK控件定义的手指形状开始工作,并进行调整以使指尖触摸IK控件。它被设计为暂时将指尖锁定在其接触的表面上的工具,而不是功能齐全的姿势系统。
To improve performance, the switchable parent for the IK control contains only one option beside None. Thus it is advised to add a 'held object' control using the basic.raw_copy rig to act as the common parent for the fingers with a fully functional parent switch.
- IK Local Location
Specifies the value of the Local Location option for IK controls, which decides if the location channels are aligned to the local control orientation or world.
- 指定
If enabled, allows placing the Tweak controls in different bone collections from the main controls.
- Assign Extra IK Layers
If enabled, allows placing the extra IK control in different bone collections from the main controls.
Note
Rotation Axis (Bend Rotation Axis in the case of limbs.super_finger) affects the roll of the generated bones. Automatic mode recalculates the generated bones roll while any of the Manual modes copy the roll of the meta-rig bones.
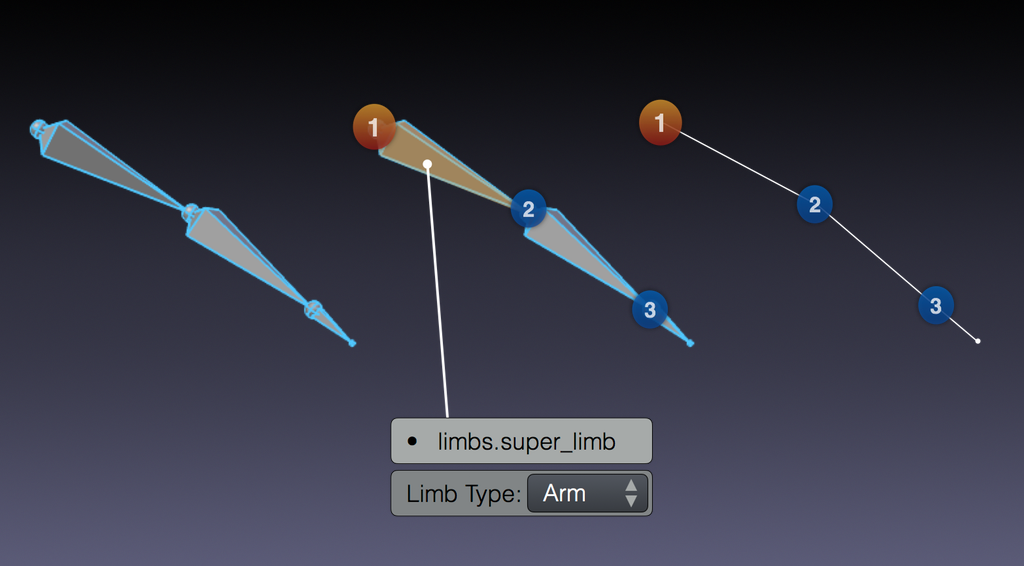
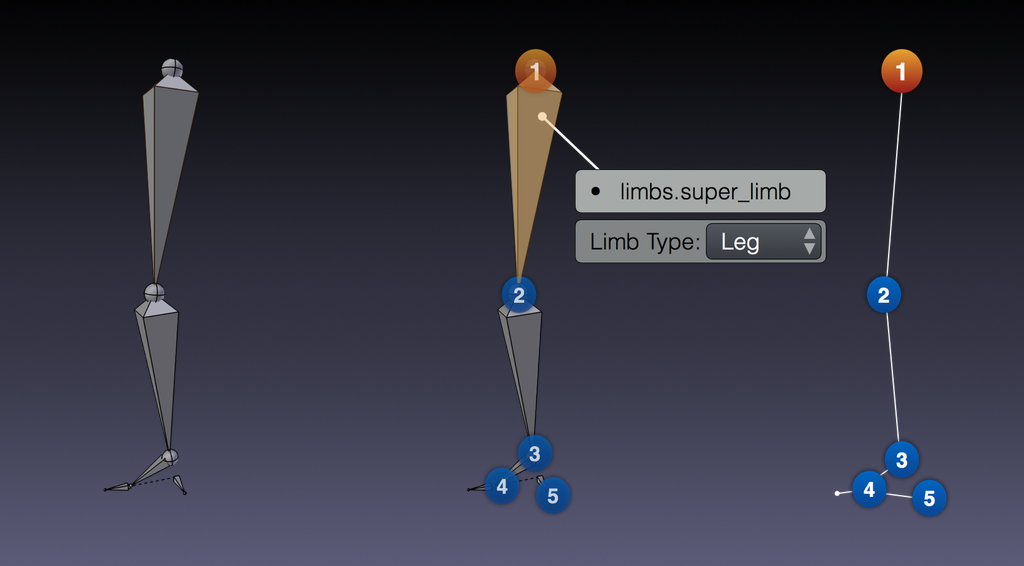
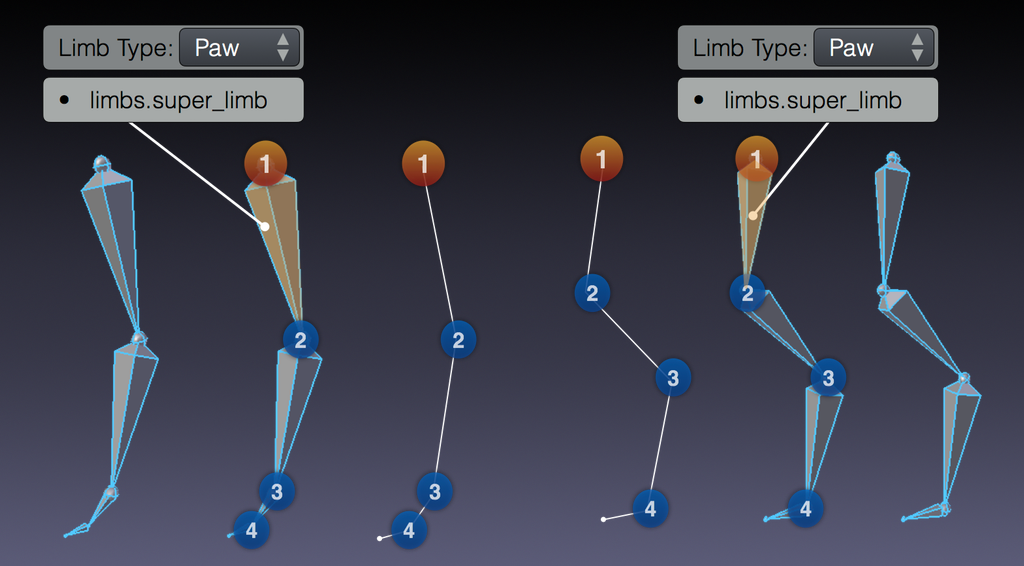
limbs.super_limb (四肢)#
A backwards compatibility wrapper around limbs.arm, limbs.leg and limbs.paw.
limbs.arm (臂)#
Will create a fully featured bendy and stretchy arm depending on the user-defined options.
要求:三个相连的骨骼链(上臂,前臂,手)。
手臂需要骨头。#
- IK腕部支点
生成围绕手骨尾部旋转的手部IK控制的额外子级。
- 旋转 X, Y, Z
定义IK链的弯曲轴。FK链将在所有轴上具有完全自由的旋转程度。
limbs.super_limb定义每个肢体骨骼在最终装配器上将具有的额外微调控件的数量。
- 柔性骨骼段 (整数)
定义每个微调控件将拆分为的骨段数。
- 自定义IK轴
为IK肢体末端生成额外的控件,允许围绕任意放置的枢轴旋转。
- FK
If enabled, allows placing the FK chain in different bone collections from the IK bones.
- 指定
If enabled, allows placing the Tweak controls in different bone collections from the IK bones.
limbs.leg (腿)#
Will create a fully featured bendy and stretchy leg depending on the user-defined options.
要求:由四块连接的骨骼(大腿、小腿、脚、脚趾)组成的链条,其中一只未连接的足小孩用作脚跟枢轴。
手臂需要骨头。#
- 足部枢轴(脚踝、脚趾、脚踝和脚趾)
指定放置主IK控件的枢轴位置的位置,或是否在脚趾基部生成其他枢轴控件。
- 分离IK脚趾
指定应为IK和FK生成两个单独的脚趾控件,而不是共享一个骨骼。这对于在所有可能的姿势中获得完全正确的IK-FK捕捉是必要的。
- Toe Tip Roll
Generates a slider to switch the heel control to pivot on the tip rather than the base of the toe (for roll this obviously only applies on forward roll).
- 旋转 X, Y, Z
定义IK链的弯曲轴。FK链将在所有轴上具有完全自由的旋转程度。
limbs.super_limb定义每个肢体骨骼在最终装配器上将具有的额外微调控件的数量。
- 柔性骨骼段 (整数)
定义每个微调控件将拆分为的骨段数。
- 自定义IK轴
为IK肢体末端生成额外的控件,允许围绕任意放置的枢轴旋转。
- FK
If enabled, allows placing the FK chain in different bone collections from the IK bones.
- 指定
If enabled, allows placing the Tweak controls in different bone collections from the IK bones.
limbs.paw#
Will create a fully featured bendy and stretchy paw depending on the user-defined options.
要求:由四或五个连接的骨骼(大腿、小腿、爪子、可选 指、脚趾)组成的链条。
前爪/后爪需要骨骼。#
- 旋转 X, Y, Z
定义IK链的弯曲轴。FK链将在所有轴上具有完全自由的旋转程度。
limbs.super_limb定义每个肢体骨骼在最终装配器上将具有的额外微调控件的数量。
- 柔性骨骼段 (整数)
定义每个微调控件将拆分为的骨段数。
- 自定义IK轴
为IK肢体末端生成额外的控件,允许围绕任意放置的枢轴旋转。
- FK
If enabled, allows placing the FK chain in different bone collections from the IK bones.
- 指定
If enabled, allows placing the Tweak controls in different bone collections from the IK bones.
limbs.front_paw#
Derivative of limbs.paw with extended IK suitable for use in front paws. The additional IK limits the degree of change in the angle between shin and paw bones (2nd and 3rd) as the main IK control moves and rotates.
为了获得最佳效果,在休息姿势下,胫骨不应与大腿或爪子平行,即爪子的所有关节都应有一定程度的弯曲。
- 足跟IK影响
扩展IK的影响。在完全旋转时,主IK对照或趾骨不会影响爪骨的旋转,而较低的值提供一些混合。
limbs.rear_paw#
Derivative of limbs.paw with extended IK suitable for use in rear paws. The additional IK tries to maintain thigh and paw bones (1st and 3rd) in a nearly parallel orientation as the main IK control moves and rotates.
为了获得最佳效果,大腿和爪骨应在休息姿势中几乎平行开始。
limbs.super_palm (掌)#
将根据手掌骨之间的距离创建一个手掌系统。
要求:至少两个同一父母的骨骼子级。属性必须设置在内掌骨上(认为它是指数的掌骨) ,装配器控件将出现在最后一块掌骨上(认为它是小指的掌骨)。
- 两侧
在掌心两侧生成控件,影响两者之间混合的内部骨骼。
- 旋转 X, Y, Z
定义用于掌骨的自动旋转轴。
limbs.spline_tentacle (触角-样条线型)#
This rig type implements a flexible tentacle with an IK system using the Spline IK constraint. The control bones define control points of a Bezier curve, and the bone chain follows the curve.
The curve control points are sorted into three groups: start, middle and end. The middle controls are always visible and active, while the other two types can be shown and hidden dynamically using properties; when enabled they appear next to the corresponding permanent start/end control and can be moved from there.
- Extra Start Controls
Specifies the number of optional start controls to generate.
- Middle Controls
Specifies the number of middle controls to generate.
- Extra End Controls
Specifies the number of optional end controls to generate.
- Tip Control:
Specifies how the curve stretching and the final control bone work:
- Stretch To Fit
Stretches the whole bone chain to fit the length of the curve defined by the controls.
An end twist control is generated to control the twist along the chain.
- Direct Tip Control
Generates an IK end control, which directly controls the final bone of the chain similar to how regular IK works for limbs, as well as controlling the end of the bezier curve. The middle bones of the chain stretch to follow the curve and cover the gap.
The rig automatically deduces twist of up to 180 degrees based on the orientation of the end control. Higher amounts of twist have to be dialled in through an End Twist Estimate slider to avoid flipping.
- Manual Squash & Stretch
This mode allows full manual control over the chain scaling, while the chain covers as much of the curve as it can given its current length.
The start control of the chain manages its uniform squash & stretch scale, while the end twist control manages both the twist of the chain, as well as its scale at the tip (blended gradually along the length).
- Radius Scaling
Allows scaling the controls to control the thickness of the chain through the curve.
- Maximum Radius
Specifies the maximum scale allowed by the Radius Scaling feature.
- FK Controls
Generates an FK control chain and IK-FK snapping.
- FK
If enabled, allows placing the FK chain in different bone collections from the IK bones.