Remesh Modifier¶
The Remesh modifier is a tool for generating new mesh topology. The output follows the surface curvature of the input, but its topology contains only quads.
Options¶
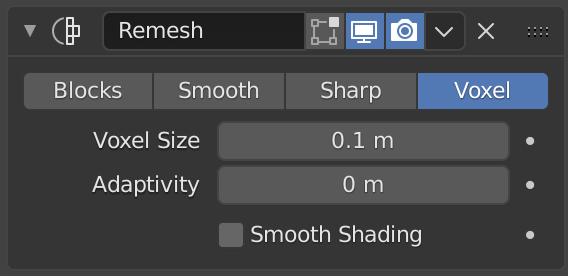
The Remesh modifier.¶
- Mode
There are three basic modes available in the Remesh modifier. The output topology is almost identical between the three modes, what changes is the smoothing.
- Blocks
There is no smoothing at all.
- Smooth
Output a smooth surface.
- Sharp
Similar to Smooth, but preserves sharp edges and corners.
- Sharpness
Higher values produce edges more similar to the input, while lower values filter out noise.
- Voxel
Uses an OpenVDB to generate a new manifold mesh from the current geometry while trying to preserve the mesh’s original volume.
- Adaptivity
Reduces the final face count by simplifying geometry where detail is not needed. This introduces triangulation to faces that do not need as much detail.
- Smooth Shading
Outputs faces with Smooth Shading instead of flat shading.
- Octree Depth
Sets the resolution of the output. Low values will generate larger faces relative to the input, higher values will generate a denser output.
- 축척(Scale)
The result can be tweaked further by this, lower values effectively decrease the output resolution.
- Remove Disconnected
Filter out small disconnected pieces of the output.
Thin parts of the input mesh can become loose, and generate small isolated bits of mesh. This option will remove those.
- Threshold
Use this to control how small a disconnected component must be to be removed.
- Smooth Shading
Output faces with smooth shading rather than flat shading. The smooth/flat shading of the input faces is not preserved.
참고
The input mesh should have some thickness to it. If the input is completely flat, add a Solidify Modifier above the Remesh one.
예시¶
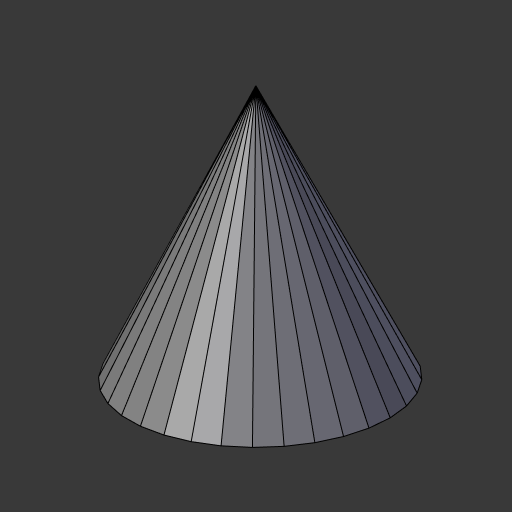
Unmodified mesh.¶ |
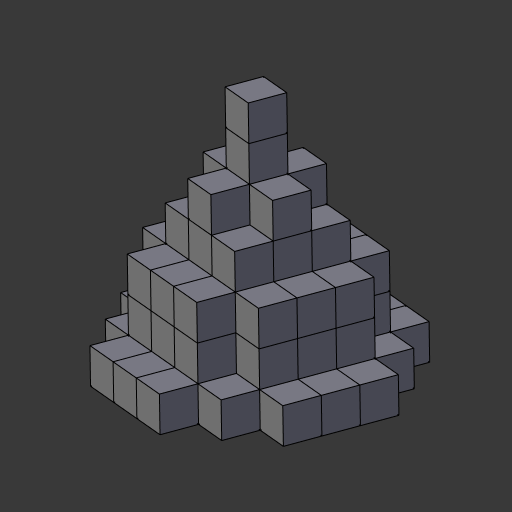
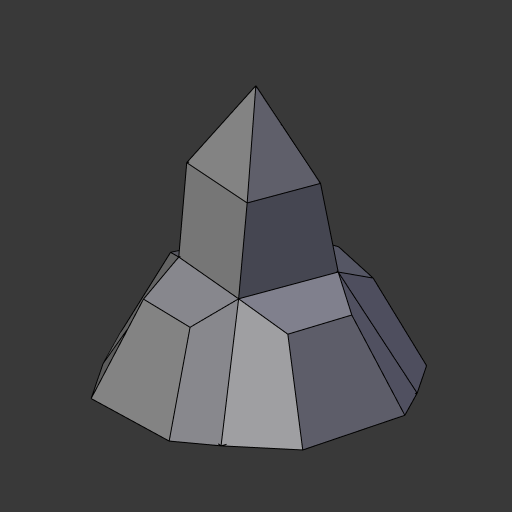
Blocks mode with Octree Depth 3.¶ |
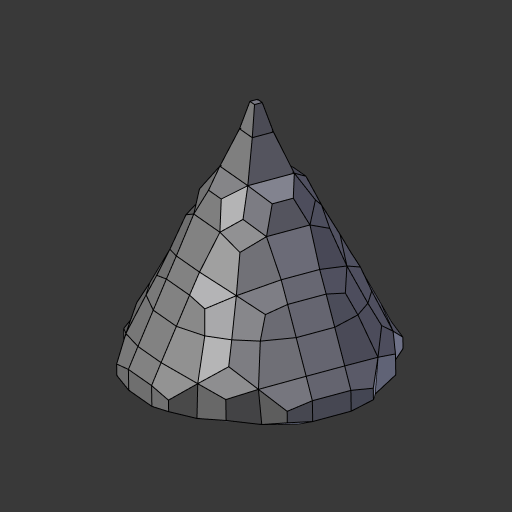
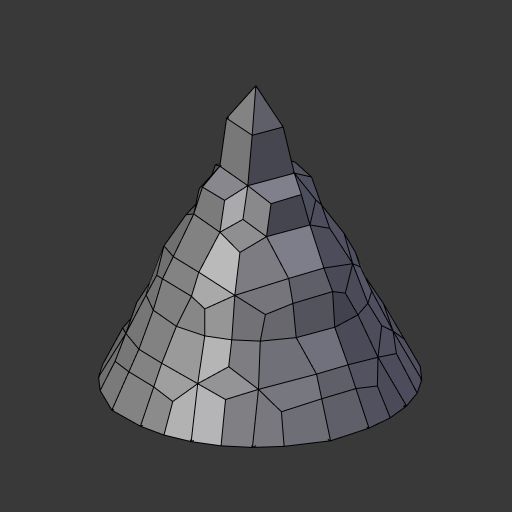
Smooth mode with Octree Depth 3.¶ |
Sharp mode with Octree Depth 2.¶ |
Sharp mode with Octree Depth 3.¶ |
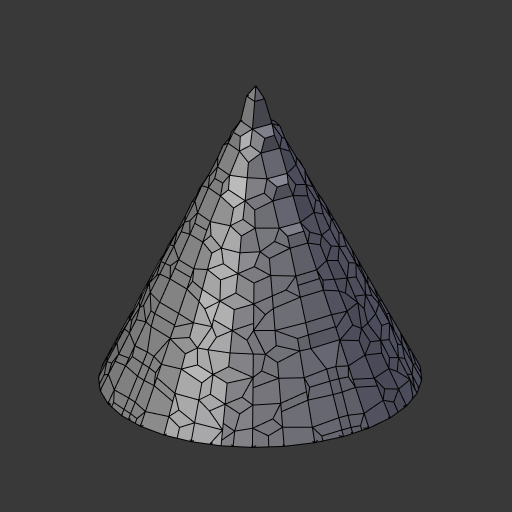
Sharp mode with Octree Depth 4.¶ |
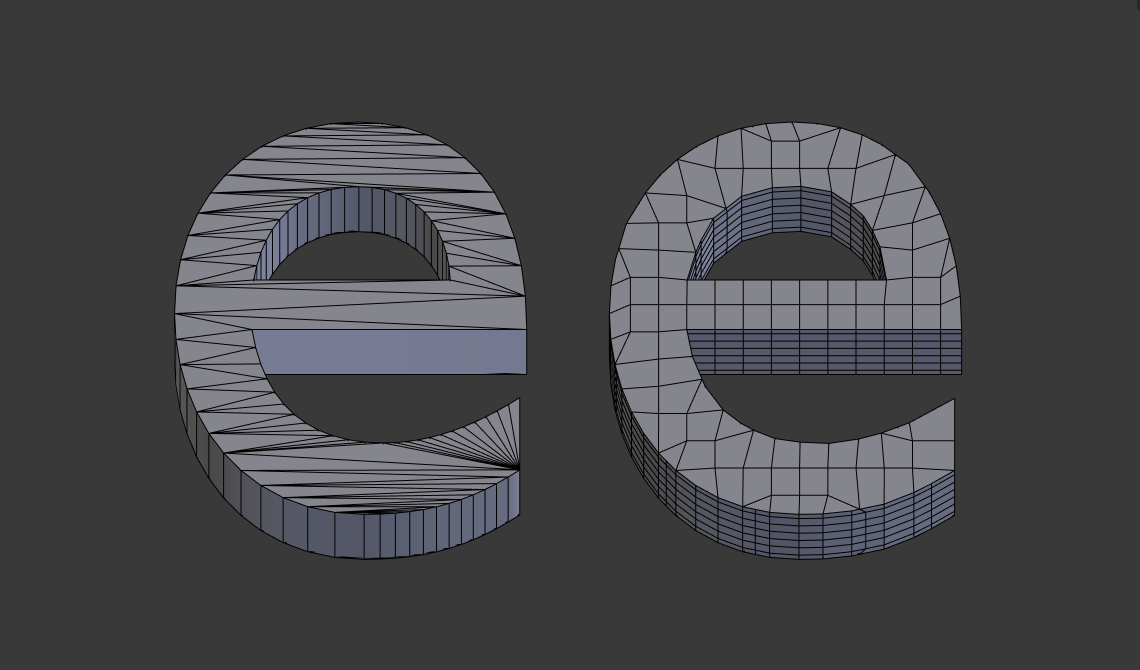
The Remesh Modifier applied to a text to improve its topology.¶