Panel de controladores#
Edit Driver popover.#
Referencia
- Editor:
Editor de curvas
- Modo:
Controladores
- Panel:
- Atajo:
N
Referencia
- Menú:
- Atajo:
Ctrl-D
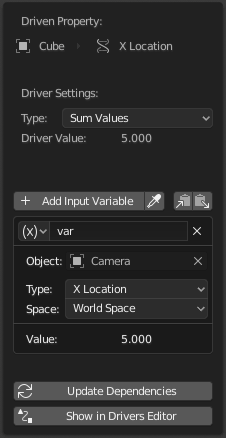
This panel is visible in Sidebar of the Drivers Editor or as a popover when adding a driver to a property.
It shows the property that is being driven, followed by a series of settings that determine how the driver works.
Opciones de controladores#
Tipo#
There are two categories of drivers:
Built-in functions (Average, Sum, Min and Max)
The driven property will have the value of the average, sum, lowest or highest (respectively) of the values of the referenced Driver Variables. If there is only one driver variable, these functions will yield the same result.
Custom (Scripted Expression).
An arbitrary Python expression that can refer to the Driver Variables by name. See Expressions.
Valor del controlador#
The current result of the driver setup. Useful for debug purposes.
Variables#
See Driver Variables.
Update Dependencies#
Forces an update for the Driver Value dependencies.
Mostrar en editor de controladores#
Opens the fully featured Drivers Editor. This button only appears in the popover version of the Drivers panel.
Driver Variables#
Variables are references to properties, transformation channels, or the result of a comparison between transformations of two objects.
Drivers should access object data via Driver Variables, rather than direct references in the Python expression, in order for dependencies to be correctly tracked.

Add, Copy, Paste buttons.#
- Add Input Variable
Agrega una nueva variable de controlador.
- Copy/Paste Variables
Copies the current variable list so it can be pasted into another driver’s variable list.
- Nombre
Name for use in scripted expressions. The name must start with a letter, and only contain letters, digits, or underscores.
- Tipo de variable
Tipo de variable a usar.
- Propiedad individual
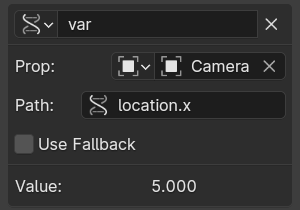
Retrieves the value of an RNA property, specified by a data-block reference and a path string.
In case of transform properties, this will return the exact value of the UI property, while Transform Channel will take parenting and/or constraints into account as needed.
See also Propiedades personalizadas.
- Tipo de ID
El tipo de bloque de datos de ID. Por ejemplo: clave, imagen, objeto, material.
- ID
El ID de ese tipo. Por ejemplo: Material.001».
- Ruta RNA
El nombre RNA de la propiedad, basado en un subconjunto de la sintaxis de acceso a atributos de Python. Por ejemplo:
location.xolocation[0]para el valor del canal de animación de posición X (antes de las jerarquías o restricciones) o["nombre_prop"]para el valor de una propiedad personalizada.- Alternativa
If enabled, allows specifying a fallback value to use as the variable value if the RNA Path cannot be resolved, instead of causing a driver evaluation failure. For more info see Context Property below.
Truco
The easiest way to create a variable of this type is to use the Copy As New Driver context menu option of the input property, and paste the result into the driver via Paste Driver Variables.
- Canal de transformación
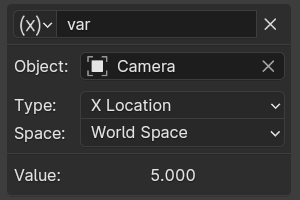
Retrieves the value of a Transform channel from an object or bone.
- ID
ID of the object. For example: Cube, Armature, Camera.
- Hueso
For armatures, the name of the Armature bone. For example: «Bone», «Bone.002», «Arm.r».
- Tipo
For example, X Location, X Rotation, X Scale.
The Average Scale option retrieves the combined scale value, computed as the cubic root of the total change in volume. Unlike X/Y/Z Scale, this value can be negative if the object is flipped by negative scaling.
- Mode (Rotation)
For rotation channels, specifies the type of rotation data to use, including different explicit Euler orders. Defaults to using the Euler order of the target. See Rotation Channel Modes.
- Espacio
World Space, Transform Space, Local Space.
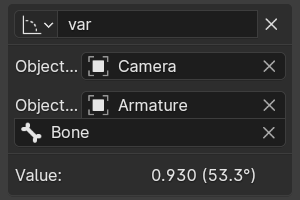
- Diferencia rotacional
Provides the value of the rotational difference between two objects or bones, in radians.
- Hueso
For armatures, the name of the Armature bone. For example: «Bone», «Bone.002», «Arm.r».
- Distancia

Proporciona el valor de la distancia entre dos objetos o huesos.
- Hueso
For armatures, the name of the Armature bone. For example: «Bone», «Bone.002», «Arm.r».
- Espacio
World Space, Transform Space, Local Space.
- Propiedad de contexto
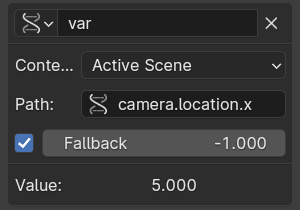
Provides the value of a property that is implicitly referring to either a scene or a view layer of the currently evaluating animation system. This is a weak reference which does not lead to the scene or view layer referenced from the driver to be linked when linking animation data.
An example when such properties comes in play is referring to a transformation of the active camera. It is possible to set up a driver in a character file, and make the driver use the set camera when the character is linked into a set.
- Contexto
Escena activa, Capa de visualización activa.
- Ruta RNA
The RNA name of the property, based on a subset of Python attribute access syntax. For example:
camera.location.xorcamera.location[0]for the camera X location animation channel value (before parenting or constraints), or["prop_name"]for a custom property.- Alternativa
If enabled, allows specifying a fallback value to use as the variable value if the RNA Path cannot be resolved, instead of causing a driver evaluation failure.
This feature can be very useful for making drivers more robust when implementing scene-global options using custom properties. When the object is linked into a different scene, these custom properties may not exist there, and the fallbacks can be used to provide sensible default values.
Fallbacks can also be used to emulate the lookup behavior of the View Layer mode of the material Attribute Node.
Truco
Although the values of the x/y/z animation channels for the camera location can be accessed via
camera.location[0/1/2], retrieving its world space location and orientation after parenting and constraints currently requires usingcamera.matrix_world. This property can be understood easily by viewing the matrix as an array of four vectors in World space:matrix_world[0][0/1/2]is the Screen Right direction vector (camera local X).matrix_world[1][0/1/2]is the Screen Up direction vector (camera local Y).matrix_world[2][0/1/2]is the opposite of the direction the camera is pointing.matrix_world[3][0/1/2]is the location of the camera.
- Valor
Shows the value of the variable.
Rotation Channel Modes#
Rotation Transform Channels support a number of operation modes, including:
- Auto Euler
Uses the Euler order of the target to decompose rotation into channels.
- XYZ Euler, …
Explicitly specifies the Euler rotation order to use.
- Cuaternio
Proporciona la representación de la rotación expresada en cuaternios.
- Swing and X/Y/Z Twist
Decomposes the rotation into two parts: a Swing rotation that aims the specified axis in its final direction, followed by a Twist rotation around that axis. This is often necessary for driving corrective Shape Keys and bones for organic joint rotation.
This decomposition is often produced in rigs by using a helper bone with a Damped Track Constraint to extract the swing part, and its child with Copy Transforms to extract the twist component.
The channels values for Swing and Y Twist are:
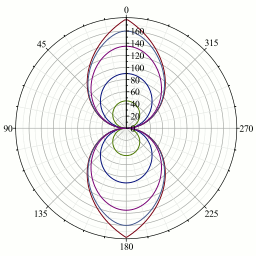
Falloff curves for weighted angles.#
- Y Rotation
True angle of the twist rotation.
- W Rotation
True angle of the swing rotation, independent of its direction.
- X Rotation, Z Rotation
Weighted angles that represent the amount of swing around the X/Z axis.
The magnitude of the angle equals W Rotation when the rotation is purely around that axis, and fades out to zero as the direction changes toward the other axis, following the falloff curves from the graph on the right.
Mathematically, the swing angles are computed from quaternion components, using \(2 \arccos(w)\) for W and \(2 \arcsin(x)\) etc. for the others. The component of the swing rotation that corresponds to the twist axis is always 0, and is replaced by the twist angle.
Expresiones#
- Expresión
A text field where you can enter an arbitrary Python expression that refers to Driver Variables by their names.
The expression has access to a set of standard constants and math functions from
math,bl_mathand other modules, provided in the Driver Namespace. For an example of adding a custom function to the namespace, see the driver namespace example.For performance reasons it is best to use the Simple Expressions subset as much as possible.
- Use Self
If this option is enabled, the variable
selfcan be used for drivers to reference their own data. Useful for objects and bones to avoid having creating a Driver Variable pointing to itself.Example:
self.location.xapplied to the Y rotation property of the same object will make the object tumble when moving.Note that dependencies for properties accessed via
selfmay not be fully tracked.
Expresiones simples#
Blender can evaluate a useful subset of Python driver expressions directly, which significantly improves performance, especially on multi-core systems. To take advantage of this, the driver expression must only use the following features:
- Variable Names
Use only ASCII characters.
- Literales
Floating-point and decimal integer.
- Globales
frame- Constantes
pi,True,False- Operadores
+,-,*,/,==,!=,<,<=,>,>=,and,or,not, conditional operator/ ternary if- Funciones estándar
min,max,radians,degrees,abs,fabs,floor,ceil,trunc,round,int,sin,cos,tan,asin,acos,atan,atan2,exp,log,sqrt,pow,fmod- Funciones proporcionadas por Blender
lerp,clamp,smoothstep
Simple expressions are evaluated even when Python script execution is disabled.
When an expression outside of this subset is used, Blender displays a «Slow Python expression» warning. However, as long as the majority of drivers use simple expressions, using a complex expression in select few is OK.
Ver también