Transformation Constraint¶
This constraint is more complex and versatile than the other "transform" constraints. It lets you set the location, rotation or scale of an object/bone based on the location, rotation or scale of another, mixing and matching axes as you see fit. An example could be to set a gear's X rotation based on the Y coordinate of a rail next to it.
The constraint works with input and output value ranges, one for each axis. It first clamps the input value to the Map From range, then offsets and scales it to the corresponding Map To range. This lets you, say, map a Y coordinate in the range (-3m, 3m) to an X rotation in the range (0, 180°).
Options(オプション)¶
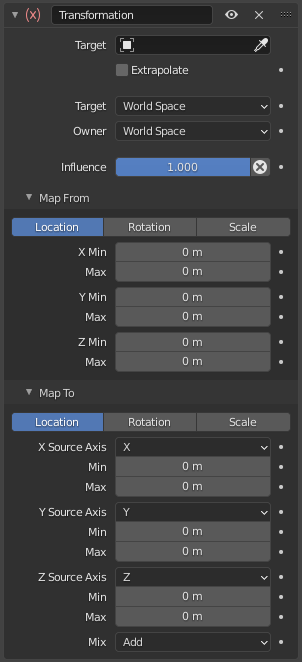
Transformation constraint.¶
- Target
The object or bone to retrieve the transformation from.
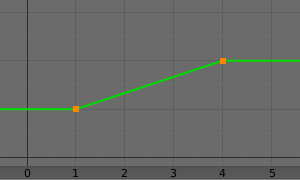
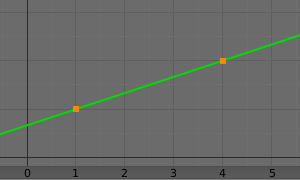
- Extrapolate
By default, the input and output values are clamped to the Min/Max values. When you enable Extrapolate, they're allowed to go beyond these limits. This is illustrated with the graphs below, where the X axis represents the input (Map From set to Min = 1 and Max = 4) and the Y axis represents the output (Map To set to Min = 1 and Max = 2).
- Target/Owner
The spaces for retrieving the transformation from the target and for applying it to the owner.
- Influence(影響)
How strongly the constraint affects the owner.
Map From¶
The transformation to read from the Target.
- Location, Rotation, Scale
The type of transformation to read.
- Mode Rotation
The type of rotation to use, including different Euler orders, Quaternion, and other Rotation Channel Modes. Defaults to using the Euler order of the constraint owner.
In the Quaternion mode, the channels are converted to weighted angles in the same way as the swing angles of the Swing and X/Y/Z Twist modes.
- X/Y/Z Min, Max
The input value range for each axis.
Map To¶
The transformation to apply to the owner.
- Location, Rotation, Scale
The type of transformation to apply.
- Order Rotation
Which Euler order to use. Defaults to the order of the constraint owner.
- X/Y/Z Source Axis
For each of the three output axes, lets you choose the input axis that it should take its value from. You can select the same input axis multiple times.
- Min(最小)、Max(最大)
The output value range for each axis.
- Mix(ミックス)
Specifies how the result of the constraint is combined with the existing transformation. The set of available choices varies based on the type of transformation.
- Replace(置き換え)
The result of the constraint replaces the existing transformation.
- Multiply Scale
The new values are multiplied with the existing axis values.
- Add Location Rotation
The new values are added to the existing axis values.
- Before Original Rotation
The new rotation is added before the existing rotation, as if it were applied to a parent of the constraint owner.
- After Original Rotation
The new rotation is added after the existing rotation, as if it were applied to a child of the constraint owner.
注釈
For historical reasons, the Mix mode defaults to Add for location and rotation, and Replace for scale.
When using the rotation of the target as input, whatever the real values are, the constraint will always "take them back" into the (-180 to 180) range. E.g. if the target has a rotation of 420 degrees around its X axis, the values used as X input by the constraint will be:
\(((420 + 180) modulo 360) - 180 = 60 - 180 = -120\)
As such, this constraint is not really suited for transforming an object based on a gear's rotation. Rotating a gear based on an object's transformation works fine, however.
Similarly, when using the scale transform properties of the target as input, whatever the real values are, the constraint will always take their absolute values (i.e. invert negative ones).
When a Min value is higher than its corresponding Max one, both are considered equal to the Max one. This means you cannot create "reversed" mappings.
例¶
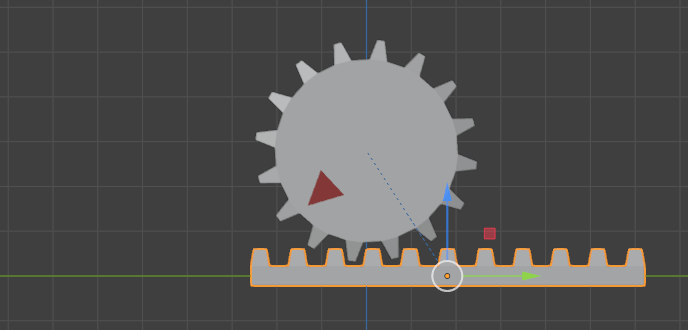
In the following example, we add a constraint to a gear that sets its X rotation based on the Y position of a rail:
Target: Rail object
Map From: Location
Y Min: -3m
Y Max: 3m
Map To: Rotation
X Source Axis: Y
X Min: 0°
X Max: 180°
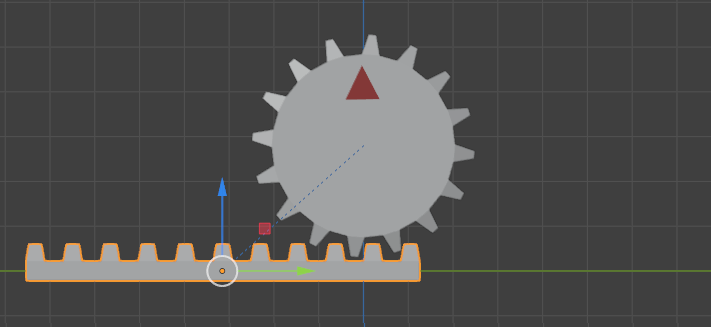
Before moving the rail.¶
After moving the rail.¶
By default, the gear will stop rotating if the rail goes outside the (-3m, 3m) range. You can enable Extrapolate to change this.