Extremidades¶
Estos tipos de sistemas de control permitirán definir la generación de distintos tipos de extremidades y sus características, tales como los dedos.
limbs.simple_tentacle¶
Permitirá crear un tentáculo simple, mediante huesos flexibles, capaz de flexionarse y estirarse. Podrá, opcionalmente, replicar la rotación local de los huesos precedentes hacia los subsiguientes, para su uso en casos como los dedos.
Requerimiento: Una cadena con al menos dos huesos conectados.
- Ejes automáticos (X, Y, Z, ninguno)
Activará la automatización de los ejes seleccionados. Podrán seleccionarse varios ejes (o ninguno), manteniendo presionado Mayús-LMB. Cuando se encuentre activa para un eje, los huesos de control subsiguientes copiarán las rotaciones locales de los huesos anteriores. La opción se encontrará accesible en los controles del sistema de control final como una restricción Copiar rotación y podrá ser desactivada aún luego de que el sistema de control hubiera sido generado, así como al momento de ser animado.
- Asignar retoque a colecciones
Cuando esta opción se encuentre activa, permitirá ubicar los controles de retoque en diferentes colecciones de huesos que las de los controles principales.
limbs.super_finger¶
Permitirá crear una cadena de dedos, capaz de flexionarse y estirarse y con un control principal que permitirá rotar todas las articulaciones, mediante la variación de su escala.
Requerimiento: Una cadena con al menos dos huesos conectados.
- Eje de rotación de flexión (Automático, X, Y, Z, -X, -Y, -Z)
Permitirá definir el eje de rotación automático a ser vinculado a la escala del hueso principal.
- Segmentos de hueso flexible (entero)
Permite definir la cantidad de segmentos de hueso flexible en que será dividido cada control de retoque.
- Control IK
Generará un mecanismo muy simple de cinemática inversa (IK), con un único control.
La cinemática inversa (IK) comenzará su trabajo a partir de la forma del dedo definida por los controles de cinemática directa (FK), y ajustándolo para hacer que su punta toque el control de IK. Está diseñado como una herramienta para mantener la punta del dedo temporalmente fija a la superficie de contacto, en vez de ser un sistema completo de generación de poses.
Para mejorar el rendimiento, el superior intercambiable del control de cinemática inversa (IK) contendrá sólo una opción, además de la opción Ninguno. Por lo que será recomendable agregar un control de tipo objeto sujeto (“held_object”) usando el sistema de control basic.pivot para que actúe como el superior común a todos los dedos, mediante una opción de intercambio de superiores completamente funcional.
- Posición IK local
Especificará el valor de la opción Posición local, para los controles de cinemática inversa (IK), que decidirá si los canales de posición se encontrarán alineados a la orientación local del control o a la orientación global.
- Asignar retoque a colecciones
Cuando esta opción se encuentre activa, permitirá ubicar los controles de retoque en diferentes colecciones de huesos que las de los controles principales.
- Asignar IK adicional a colecciones
Cuando esta opción esté activa, permitirá ubicar el control adicional de cinemática inversa (IK) en distintas las colecciones de huesos de los controles principales.
Nota
Eje de rotación (Eje de rotación de flexión, en el caso de limbs.super_finger) afectará el giro de los huesos generados. El modo Automático recalculará el giro de los huesos generados, mientras que cualquiera de los modos manuales copiará el giro de los huesos del metarig.
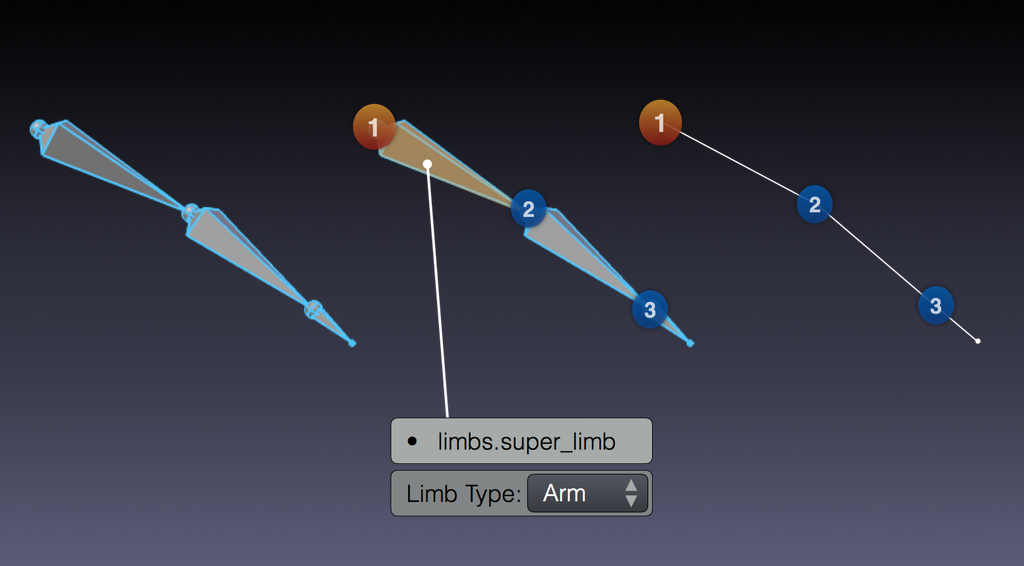
limbs.super_limb¶
Un paquete englobando los sistemas limbs.arm, limbs.leg y limbs.paw, para obtener compatibilidad con versiones anteriores.
limbs.arm¶
Permitirá crear un sistema de brazo con funcionalidad completa, capaz de flexionarse y estirarse, y dependiente de opciones definidas por el usuario.
Requerimiento: Una cadena con tres huesos conectados para brazo, antebrazo y mano (upper_arm, forearm, hand).
Huesos requeridos para un brazo.¶
- Pivote muñeca IK
Generará un subordinado adicional al control de cinemática inversa (IK) de la mano, que rotará alrededor de la cola del hueso de la mano.
- Eje de rotación (Automático, X, Z)
Definirá el eje de flexión para la cadena de cinemática inversa (IK). Las cadenas de cinemática directa (FK) tendrán un total grado de libertad de rotación alrededor de los tres ejes.
- Segmentos de la extremidad
Definirá la cantidad de controles adicionales de retoque que tendrá cada hueso de la extremidad en el sistema de control generado.
- Segmentos de hueso flexible (entero)
Permite definir la cantidad de segmentos de hueso flexible en que será dividido cada control de retoque.
- Pivote de IK personalizado
Generará un control adicional para el final de la extremidad IK, que permitirá rotarla alrededor de un pivote ubicado de manera arbitraria.
- Asignar FK a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de cinemática directa (FK) en distintas colecciones de huesos que los huesos de cinemática inversa (IK).
- Asignar retoque a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de controles de retoque en distintas colecciones de huesos que los huesos de cinemática inversa (IK).
limbs.leg¶
Permitirá crear un sistema de pierna con funcionalidad completa, capaz de flexionarse y estirarse, y dependiente de opciones definidas por el usuario.
Requerimiento: Una cadena con cuatro huesos conectados para muslo, pantorrilla, pie y dedos (thigh, shin, foot, toe) y un hueso desconectado (pero subordinado) para ser usado como pivote del talón (heel).
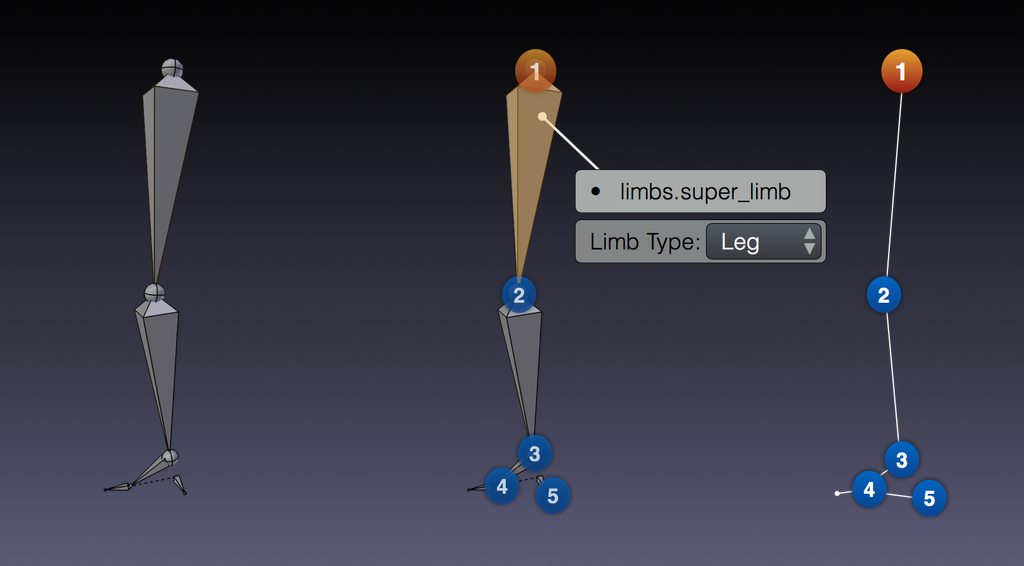
Huesos requeridos por una pierna.¶
- Pivote del pie (Tobillo, Dedos, Tobillo y dedos)
Permitirá especificar dónde ubicar la posición del punto de pivote del control principal de cinemática inversa (IK) o dónde generar un control de pivote adicional, en la base del pie.
- Separar IK dedos
Especificará que se generen dos controles separados para cinemática inversa (IK) y directa (FK) para el dedo del pie, en vez de compartir un mismo hueso. Esto será necesario para obtener una adherencia completamente correcta entre IK y FK en todas las poses posibles.
- Balanceo punta dedos
Generará un deslizador para cambiar el control del talón, haciendo que pivote en la punta de los dedos, en vez de hacerlo en la base de los mismos (cuando gira hacia adelante).
- Eje de rotación (Automático, X, Z)
Definirá el eje de flexión para la cadena de cinemática inversa (IK). Las cadenas de cinemática directa (FK) tendrán un total grado de libertad de rotación alrededor de los tres ejes.
- Segmentos de la extremidad
Definirá la cantidad de controles adicionales de retoque que tendrá cada hueso de la extremidad en el sistema de control generado.
- Segmentos de hueso flexible (entero)
Permite definir la cantidad de segmentos de hueso flexible en que será dividido cada control de retoque.
- Pivote de IK personalizado
Generará un control adicional para el final de la extremidad IK, que permitirá rotarla alrededor de un pivote ubicado de manera arbitraria.
- Asignar FK a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de cinemática directa (FK) en distintas colecciones de huesos que los huesos de cinemática inversa (IK).
- Asignar retoque a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de controles de retoque en distintas colecciones de huesos que los huesos de cinemática inversa (IK).
limbs.paw¶
Permitirá crear un sistema de pata con funcionalidad completa, capaz de flexionarse y estirarse, y dependiente de opciones definidas por el usuario.
Requerimiento: Una cadena con cuatro o cinco huesos conectados para muslo, pantorrilla, pata, dedo opcional y garra (thigh, shin, paw, digit, toe).
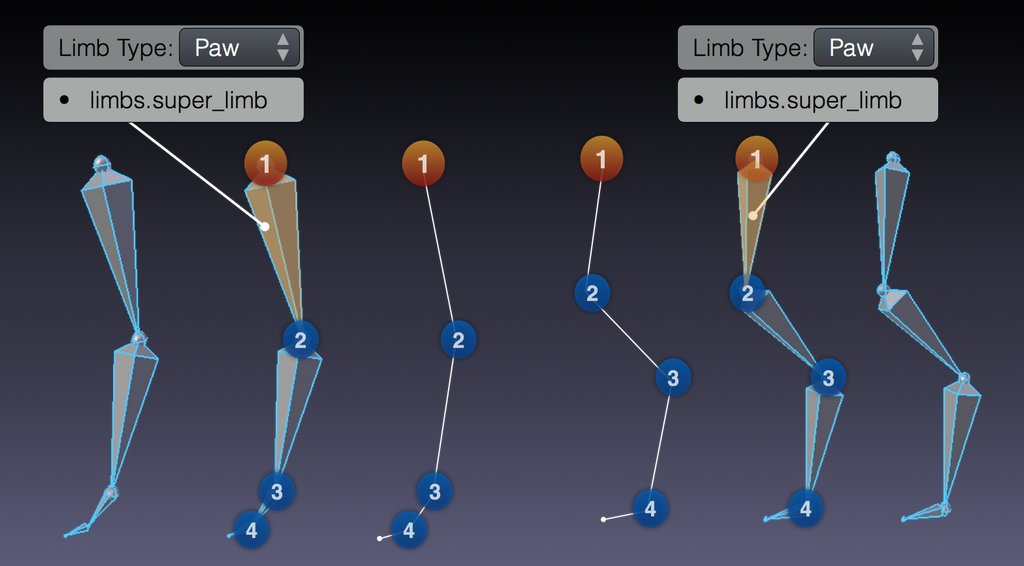
Huesos requeridos por patas delanteras y traseras.¶
- Eje de rotación (Automático, X, Z)
Definirá el eje de flexión para la cadena de cinemática inversa (IK). Las cadenas de cinemática directa (FK) tendrán un total grado de libertad de rotación alrededor de los tres ejes.
- Segmentos de la extremidad
Definirá la cantidad de controles adicionales de retoque que tendrá cada hueso de la extremidad en el sistema de control generado.
- Segmentos de hueso flexible (entero)
Permite definir la cantidad de segmentos de hueso flexible en que será dividido cada control de retoque.
- Pivote de IK personalizado
Generará un control adicional para el final de la extremidad IK, que permitirá rotarla alrededor de un pivote ubicado de manera arbitraria.
- Asignar FK a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de cinemática directa (FK) en distintas colecciones de huesos que los huesos de cinemática inversa (IK).
- Asignar retoque a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de controles de retoque en distintas colecciones de huesos que los huesos de cinemática inversa (IK).
limbs.front_paw¶
Es un derivado del sistema limbs.paw con controles de cinemática inversa (IK) extendidos, apropiados para su uso en patas delanteras. La cinemática inversa adicional limitará el grado de cambio en el ángulo entre los huesos de la pantorrilla y la pata (2do y 3er huesos) mientras el control principal de IK se mueve y rota.
Para un mejor resultado, el hueso de la pantorrilla no debería ser paralelo ni a el hueso del muslo, ni al de la pata, cuando esté en reposo (es decir, debería haber cierto grado de flexión en todas las articulaciones de la pata).
- Influencia IK talón
Es la influencia del control adicional de IK. Cuando se encuentre en su valor máximo, rotar el control principal de cinemática inversa (IK) o el hueso de los dedos no afectará a la rotación del hueso de la pata, mientras que con valores más bajos se producirá un cierto grado de fundido.
limbs.rear_paw¶
Es un derivado del sistema limbs.paw con controles de cinemática inversa (IK) extendidos, apropiados para su uso en patas traseras. La cinemática inversa adicional intentará mantener los huesos del muslo y la pata (1er y 3er huesos) con una orientación casi paralela, mientras el control principal de IK se mueve y rota.
Para un mejor resultado, los huesos del muslo y la pata deberían comenzar siendo casi paralelos en la pose de reposo.
limbs.super_palm¶
Permitirá crear un sistema de palma, basándose en la distancia entre los huesos de la palma.
Requerimiento: Al menos dos huesos subordinados al mismo superior. La propiedad deberá ser definida en los huesos internos de la palma (p.ej: el metacarpo del índice), el control aparecerá en el último hueso de la palma (p.ej: el metacarpo del meñique).
- Ambos lados
Generará controles a ambos lados de la palma, con la influencia resultante sobre los huesos intermedios siendo una mezcla de ambos.
- Eje primario de rotación (X, Z)
Definirá el eje automático de rotación a ser usado en los huesos de la palma.
limbs.spline_tentacle¶
Este tipo de sistema de control implementa un tentáculo flexible, con un sistema de cinemática inversa (IK) que utiliza una restricción Cinemática inversa (curva). Los huesos de control definirán puntos de control de una curva Bezier y la cadena de huesos seguirá a la curva.
Los puntos de control de la curva serán ordenados e tres grupos: iniciales, medios y finales. Los controles medios estarán siempre visibles y activos, mientras que los otros dos tipos podrán ser mostrados u ocultados dinámicamente mediante el uso de propiedades; cuando se encuentren activos aparecerán junto a los controles iniciales/finales permanentes y podrán ser movidos desde allí.
- Controles iniciales adicionales
Especificará la cantidad de controles iniciales adicionales a generar.
- Controles medios
Especificará la cantidad de controles medios a generar.
- Controles finales adicionales
Especificará la cantidad de controles finales adicionales a generar.
- Control punta:
Especificará cómo funcionarán el estiramiento de la curva y el hueso de control final:
- Estirar hasta abarcar
Estirará la cadena completa de huesos hasta abarcar la longitud de la curva definida por los controles.
Se generará un control final de torsión, para controlar la torsión a lo largo de la cadena.
- Control directo de la punta
Generará un control final de cinemática inversa (IK), que controlará al hueso final de la cadena de forma similar a cómo funciona la cinemática inversa normal en las extremidades, además también controlará el extremo final de la curva Bezier. Los huesos intermedios de la cadena se estirarán para seguir a la curva y cubrir el espacio.
El sistema de control deducirá automáticamente la torsión hasta los 180 grados, basándose en la orientación del control final. Niveles más altos de torsión deberán ser ingresados mediante el deslizador End Twist Estimate, para evitar una inversión súbita no deseada.
- Comprimir / Estirar manualmente
Este modo permitirá un control manual completo sobre la escala de la cadena, mientras la cadena cubre la longitud de la curva en la medida de lo posible, según su propia longitud actual.
El control inicial de la cadena administrará su escala uniforme de compresión/estiramiento, mientras que el control final de torsión administrará tanto la torsión de la cadena, como la escala en la punta (fundida de manera gradual a lo largo de su extensión).
- Escalado del radio
Permitirá usar la escala de los controles para controlar el grosor de la cadena a lo largo de la curva.
- Radio máximo
Permitirá especificar la escala máxima permitida por la función Escalado del radio.
- Controles FK
Generará una cadena de controles de cinemática directa (FK) y botones para la adherencia entre IK-FK.
- Asignar FK a colecciones
Cuando esta opción esté activa, permitirá ubicar a la cadena de cinemática directa (FK) en distintas colecciones de huesos que los huesos de cinemática inversa (IK).