Nodo Mapa de normales¶
El nodo Mapa de normales generará una perturbación en las normales de la superficie, a partir de una imagen RVA. La entrada Color del nodo estará usualmente conectada a una textura de Imagen, que especificará el mapa de normales a ser usado. Para mapas de normales en espacio tangencial, las coordenadas UV de la imagen deberán coincidir con las del modelo y su «Espacio de color» deberá estar establecido en Datos, para obtener el resultado esperado.
Entradas¶
- Intensidad
Intensidad del efecto de mapeo de normales.
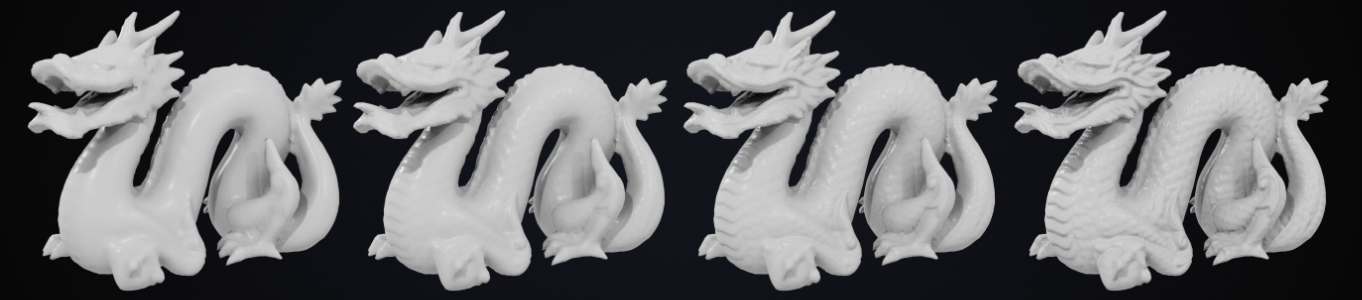
La Intensidad establecida (de izquierda a derecha) en 0, 0.5, 1 y 2.¶
- Color
Color RVA que codifica el mapa de normales, en el espacio establecido.
Propiedades¶
- Espacio
El color RVA de entrada podrá encontrarse expresado en uno de tres espacios posibles: Tangencial, Del objeto o Global. Los mapas de normales en espacio tangencial son los más frecuentes, dado que toman en cuenta tanto las transformaciones de los objetos como las deformaciones de sus mallas. El espacio del objeto se mantendrá adherido a la superficie de los objetos durante su transformación, mientras que los mapas de normales en espacio global quedarán fijos a un punto en el espacio.
- Mapa UV
Nombre del mapa UV a partir del cual derivar las tangentes para el mapa de normales. Este mapa UV deberá ser el mismo que haya sido usado para generar la textura de normales conectada a la entrada Color.
Salidas¶
- Normal
Normal resultante, que podrá ser usada como entrada en nodos de sombreado BSDF.
Ejemplo¶

La Intensidad del mapa de normales se encuentra establecida en 1.¶