Столкновения (сollisions)¶
Ссылка
- Панель:
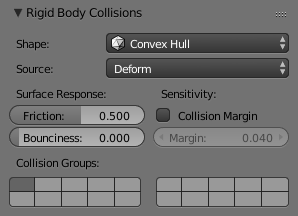
Панель твёрдого тела «Collisions».¶
- Форма (shape)
Определяет форму, используемую для расчёта столкновений с объектом; их можно разделить на две категории: примитивные формы и формы на основе меша.
Примитивные формы (куб, сфера, капсула, цилиндр и конус) лучше всего подходят с точки зрения использования памяти и производительности, но не обязательно отражают фактическую форму объекта. Размер формы рассчитывается на основе габаритного контейнера объекта. Центр тяжести всегда находится в геометрическом центре фигуры. Примитивные формы можно отобразить в 3D-вьюпорте, включив «дополнительные» наложения.
Формы на основе меша (выпуклая оболочка и меш) рассчитываются на основе геометрии объекта, поэтому они лучше представляют объект. Центром тяжести этих фигур является ориджин объекта.
- Куб (box):
Кубические формы (например, кубы), включая плоскости (например, наземные плоскости). Размер по оси рассчитывается на основе габаритного контейнера.
- Сфера (sphere):
Сферические формы. Радиус – это наибольшая ось габаритного контейнера.
- Капсула (capsule):
Указывается «верх» по оси Z.
- Цилиндр (cylinder):
Указывается «верх» по оси Z. Высота берётся по оси Z, а радиус – по бо́льшей из осей X или Y.
- Конус (cone):
Указывается «верх» по оси Z. Высота берётся по оси Z, а радиус – по бо́льшей из осей X или Y.
- Выпуклая оболочка (convex hull):
Поверхность, похожая на меш, охватывающая (например, обёрнутая) все вершины (лучшие результаты с меньшим количеством вершин). Выпуклая аппроксимация объекта, имеющая хорошую производительность и стабильность.
- Меш (mesh):
Меш, состоящий только из треугольников, обеспечивающий более детальное взаимодействие, чем выпуклые оболочки. Позволяет симулировать вогнутые объекты, но работает довольно медленно и нестабильно.
- Составное родство (compound parent):
Берёт формы коллизий от дочерних объектов и объединяет их. Это позволяет создавать вогнутые формы из примитивных форм. Обычно это приводит к более быстрой симуляции, чем форма столкновения меша, а также в целом более стабильная.
- Источник (source)
Источник меша, используемый для создания формы для столкновения.
- Основа (base):
Базовый меш объекта.
- Деформация (deform):
Включает любые деформации, добавленные к мешу (ключи формы, модификаторы деформации).
- Итоговый результат (final):
Включает в себя все деформации и модификаторы.
- С деформацией (deforming)
Формы меша могут деформироваться во время симуляции.
Отклик поверхности (surface response)¶
- Трение (friction)
Сопротивление объекта движению. Указывает, какая скорость теряется при столкновении объектов друг с другом.
- Прыгучесть (bounciness)
Склонность объекта отскакивать после столкновения с другим (от 0 до 1) (от жесткого до идеально упругого). Определяет, как сильно объекты могут отскакивать после столкновений.
Чувствительность (sensitivity)¶
Граница столкновения используется для улучшения характеристик и устойчивости твёрдых тел. В зависимости от формы она ведёт себя по-разному: некоторые фигуры встраивают её, а другие имеют вокруг себя видимый зазор.
Для этих фигур отступ встроен:
Сфера (sphere)
Куб (box)
Капсула (capsule)
Цилиндр (cylinder)
Выпуклая оболочка: обеспечивает равномерный масштаб только при встраивании.
Отступ не встроен для таких фигур как:
Конус (cone)
Активный треугольный меш
Пассивный треугольный меш: в большинстве случаев может быть установлено на 0.
- Отступ (margin)
Порог расстояния вблизи поверхности, при котором столкновения всё ещё учитываются (лучшие результаты, когда значение не равно нулю).
Коллекции (collections)¶
Позволяет распределять столкновения твёрдых тел по разным группам (максимум 20).