Общие¶
Цель (target)¶
„Цель“ – это объект, на который должен ссылаться ограничитель. Например, ограничитель Copy Location копирует положение целевого объекта в тот объект, на который распространяется ограничение.
Изначально поле „Target“ является пустым, а значок ограничителя красным, что указывает на его неактивное состояние:
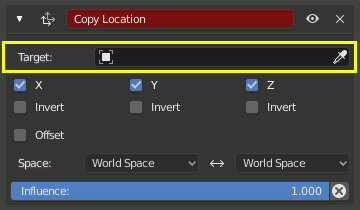
После выбора цели значок становится серым, что говорит о работе ограничителя.
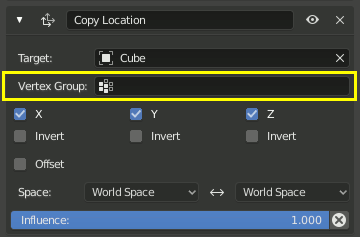
По умолчанию ограничитель использует положение ориджина целевого объекта, но если цель представляет собой меш или решётку, это можно изменить, выбрав группу вершин. В этом случае ограничитель будет использовать среднее значение веса положений вершин целевого объекта.
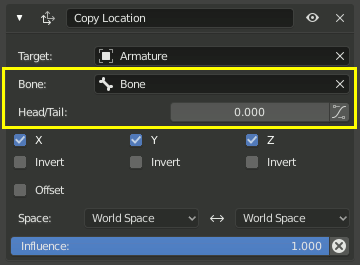
В качестве альтернативы, если целевым объектом будет арматура, то можно выбирать кость и задавать интерполированное положение между её началом и концом. Кнопка позволяет следовать изогнутой форме сгибаемых костей.
Пространство (space)¶
Пространство цели – это система отсчёта, используемая для получения координат местоположения, углов вращения и коэффициентов масштабирования целевого объекта. Пространство владельца – это система отсчёта, используемая для применения этих значений к объекту или кости, которым было назначено ограничение.
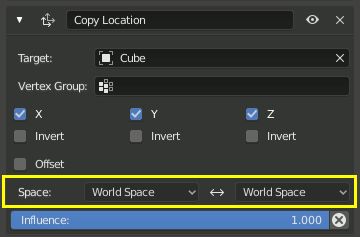
Использование „пространства мира“ как для „цели“, так и для „владельца“ помещает объект с ограничением в то же место, что и цель, независимо от их родительских объектов.¶
Типы пространств (space types)¶
- Пространство мира (world space)
Использовать трансформацию относительно мировых осей.
- Особое пространство (custom space)
Использовать трансформацию относительно произвольного объекта или кости.
- Пространство позы (pose space) Только для костей
Использовать трансформацию относительно объекта-арматуры.
- Локальное пространство (local space)
Для объекта, – использовать трансформацию относительно его родительского объекта.
Для кости, – использовать трансформацию относительно её состояния покоя после того, как это состояние покоя было трансформировано её предками. (Если у кости нет других ограничителей, это будет её трансформацией, как отображено в редакторе свойств в режиме позы.)
Предупреждение
Для объектов без родительского объекта локальное пространство имеет особое значение, сохранённое для обратной совместимости. Это поведение в будущем может быть удалено, и на него не следует полагаться; используйте пространство мира вместо него.
- Локальное с родителем (local with parent) Только для костей
Использовать трансформацию относительно состояния покоя кости. В отличие от локального пространства, это пространство включает в себя разницу во вращении и положении, вызванную вращением любой кости-предка.
- Локальное пространство (ориентация владельца) (local space (owner orientation)) Только для костей-целей
Данное пространство предназначено для использования с „владельцем“, рассчитываемым в „локальном пространстве“. Оно извлекает локальное пространство целевой кости, скорректированное для работы с ориентацией покоя кости-владельца. В результате, если родительские кости и цели, и владельца будут находиться в положении покоя, – то кость владельца будет подвергаться той же трансформации, что и целевая в пространстве арматуры. Следующее изображение это наглядно демонстрирует:

Арматура по левую сторону ограничивает целевую кость, которую мы вращаем вручную.
Арматура в центре имеет ограничитель, который копирует вращение целевой кости в локальном пространстве. Если целевая кость вращается вокруг своей оси Y, то кость-владелец будет вращаться на ту же величину вокруг своей собственной оси Y.
Арматура с правой стороны имеет ограничитель, который копирует вращение целевой кости в локальном пространстве (с ориентацией владельца). Если целевая кость вращается вокруг своей оси Y, кость владельца будет вращаться вокруг той же оси в пространстве арматуры. Изначально это аналогично использованию пространства позы или даже мирового пространства, но в случае если родительские кости также будут вращаться, – результат будет иным.
Влияние (influence)¶
Влияние является множителем силы ограничения.
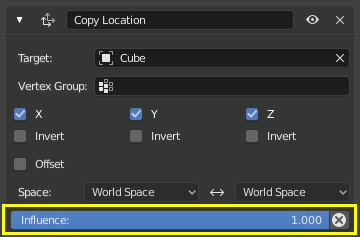
По умолчанию значение равняется „1“, что означает, что (например) ограничитель Copy Location полностью переопределяет исходное положение объекта.
Установка значения на „0“ равносильна отключению или даже удалению ограничения.
Установка значения от „0“ до „1“ даёт интерполированный результат. Например, значение „0.5“ поместит объект посередине между его предыдущим положением и положением цели.
Значение влияния может быть анимировано с помощью ключевых кадров. Что означает, что ограничения можно включать и выключать в процессе самой анимации.
- Отключить, сохраняя трансформацию
Применяет результат ограничения к собственной трансформации объекта/кости, но вместо удаления ограничителя производит его отключение, устанавливая влияние на „0“. Как и в случае с применением, данная опция может работать не идеально если ограничитель не является первым в стеке ограничителей.