Внутренние (Interior)¶
По умолчанию рёбра меша мягкого тела действуют как пружины. Это означает, что, как механические пружины, они могут растягиваться под напряжением и сжиматься под давлением. Их первоначальная длина также является их «идеальной» длиной или длиной «покоя», к которой они пытаются вернуться.
Рёбра действуют как пружины – это то, что скрепляет меш. Если бы вы отключили это поведение (также как „Цель“), каждая вершина могла бы свободно перемещаться куда угодно независимо от других, что растягивало бы меш до тех пор, пока он не стал бы неузнаваемым.
Однако наличия пружин только вдоль рёбер обычно недостаточно: вершины в четырехугольниках по-прежнему могут свободно перемещаться к своей противоположной диагонали, что потенциально может сложить четырехугольник в линию.
Вы могли бы решить эту проблему, создав повсюду диагональные рёбра, но, к счастью, вам не нужно этого делать: просто включите опцию «жёсткость», чтобы Blender создавал диагональные пружины внутренне. Таким образом, вам не придётся изменять меш.


Другой метод предотвращения разрушения меша – применение жёсткости сгиба, что добавляет сопротивление вращению: рёбра пытаются сохранить свои относительные углы.
Оба метода более подробно описаны ниже. Вы можете настроить их, как и другие параметры, на панели «рёбер» мягкого тела.
Жёсткость (stiffness)¶
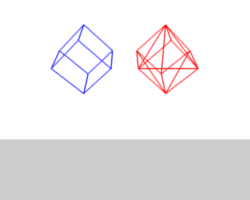
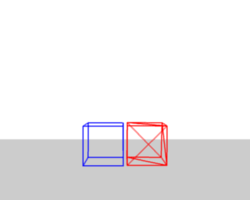
Чтобы показать эффект настройки жёсткости, мы сбросим два куба на плоскость (см. раздел «Столкновения»). В синем кубе используются четырёхугольники, а в красном – треугольники. Для обоих кубов настройка „Цели“ – отключена.
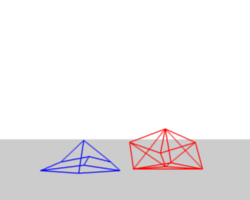
Если жёсткость отключена, – «квадро-куб» полностью рухнет, а «три-куб» лишь временно деформируется от воздействия:
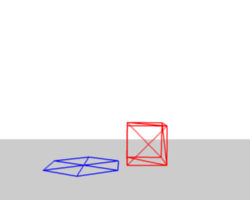
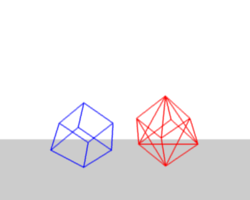
Если жёсткость включена – «квадро-куб» сохраняет свою форму благодаря дополнительным пружинам:
Жёсткость сгиба (bending stiffness)¶
Второй способ предотвращения сплющивания объекта – придать ему жёсткость сгиба. Как и другие настройки, её можно комбинировать с жёсткостью, чтобы также добавить сопротивление изгибу диагональным пружинам.
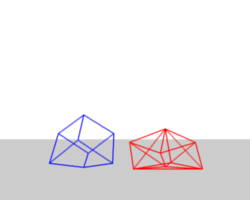
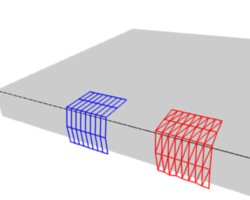
Сначала мы проведём тот же эксперимент с кубом, что и раньше, используя только жёсткость сгиба:
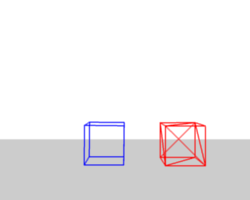
Оба куба сохраняют свою форму. Теперь мы попробуем то же самое с подразделёнными плоскостями, опять же с четырехугольным и треугольным каркасом:
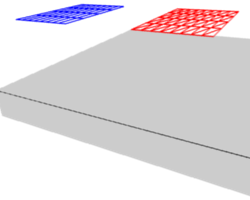
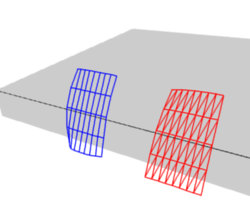
Без какой-либо жёсткости сгиба – грани могут свободно вращаться, как если бы их рёбра были шарнирами. Включение жёсткости для добавления диагональных пружин этого не изменит (точно так же, как не изменит этого и триангуляция).
Однако при высокой жёсткости сгиба – рёбра сопротивляются этому вращению, и плоскости действуют скорее как доски, чем как полотенца.