Столкновение (collision)¶
Ссылка
- Режим (mode):
Объектный режим (object mode)
- Панель:
Частицы, мягкие тела и объекты-ткани могут сталкиваться с меш-объектами. Боиды стараются избегать объекты столкновений.
Вы можете ограничить воздействие на частицы группой объектов (на панели силовые поля).
Отклонение для мягких тел затруднено, они часто проникают в сталкивающиеся объекты.
Частицы волос игнорируют объекты отклонения (но вы можете анимировать их как мягкие тела, учитывающие отклонение).
Если вы измените настройки отклонения для объекта, вам придётся пересчитать систему частиц, систему мягкого тела или ткани с помощью «удаления запекания» – автоматически это не делается.

Объект столкновения можно временно отключить с помощью анимируемого переключателя справа от кнопки, которая активирует или деактивирует его.
Опции (options)¶
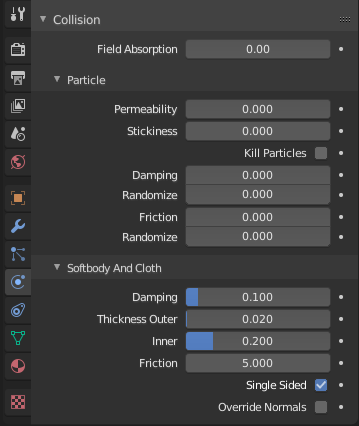
Панель столкновений.¶
Столкновение (collision)¶
- Поглощение поля (field absorption)
Дефлектор также может отклонять эффекторы. Вы можете указать некоторые объекты столкновений/отклонений, которые отклоняют определённую часть силы воздействия, используя значение поглощения поля. 100% поглощения приводит к тому, что сила вообще не проходит через объект столкновения/отклонения. Если у вас есть три объекта столкновения друг за другом, например. 10%, 43% и 3%, поглощение составляет около 50% \(100 × (1 - 0.1) × (1 - 0.43) × (1 - 0.03)\).
Частица (particle)¶
- Проницаемость (permeability)
Доля частиц, проходящих сквозь меш.
- Липкость (stickiness)
Сколько частиц прилипает к объекту.
- Уничтожение частиц (kill particles)
Удаляет частицы при ударе.
- Торможение (damping)
Торможение (затухание) при столкновении (независимо от скорости частиц).
- Рандомизировать* (randomize)
Случайное изменение торможения.
- Трение (friction)
Трение при движении по поверхности.
- Рандомизировать* (randomize)
Случайное изменение трения.
Мягкое тело и Ткань (soft body and cloth)¶
Также важно отметить, что эта панель столкновений используется для указания всем симуляциям, что этот объект должен участвовать в столкновении/отклонении других объектов на общем слое (частиц, мягких тел и ткани).
Примечание
Форма объекта деформирует ткань, поэтому симуляция ткани должна быть введена в «истинную» форму этого меш-объекта в этом кадре. Эта истинная форма является базовой формой, изменённой с помощью ключей формы или арматурами. Следовательно, модификатор Collision должен находиться после любого из них в стеке модификаторов. На изображении ниже показана панель модификаторов для меш-объекта персонажа (не объекта ткани).
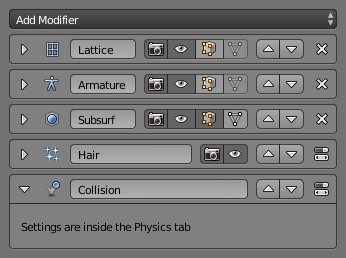
Стек для «столкновений».¶
- Торможение (damping)
Торможение (затухание) при столкновении. Величина отскока, которую будут иметь поверхности.
0.0 – Торможение (затухание) отсутствует, мягкие тела будут иметь максимальную упругость.
1.0 – Максимальное торможение (затухание), мягкие тела вообще не подпрыгивают.
- Толщина (thickness)
Расстояние отступа добавляется к внутренней и внешней сторонам каждой грани, чтобы предотвратить пересечения. Мягкое тело остановится на этом расстоянии от поверхности сталкивающегося объекта. Снаружи и внутри определяется нормаль грани, изображённая синей стрелкой на рис.: Вершина мягкого тела, сталкивающаяся с плоскостью..
- Внешний (outer)
Размер внешней зоны столкновения.
- Внутренний (inner)
Размер внутренней зоны столкновения (расстояние заполнения).
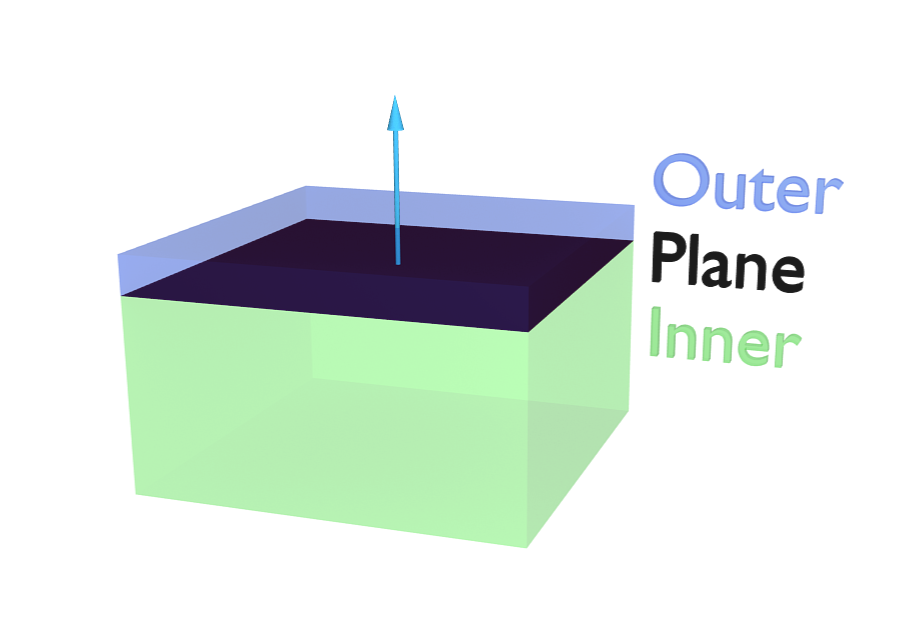
Вершина мягкого тела, сталкивающаяся с плоскостью.¶
- Трение (friction)
Коэффициент того, насколько «скользящей» становится ткань при столкновении сама с собой. Например, шёлк имеет более низкий коэффициент трения, чем хлопок.
- Односторонний (single sided)
Когда эта функция включена, считается, что объект столкновения представляет собой границу твёрдого объекта, а не тонкой поверхности, и выбрасывает пересекающуюся ткань в направлении её нормали.
- Переопределить нормали (override normals)
Если эта опция включена, импульсы столкновения ткани действуют в направлении нормалей объекта столкновения.
Примечание
Soft body collisions are difficult to get perfect. If one of the objects moves too fast, the soft body will penetrate the mesh. See also the section about Soft Bodies.
Примеры¶

Отклонённые частицы.¶
Здесь представлен мета-объект, создающий экземпляры вершин для системы частиц, излучающиеся вниз и отклоняемые мешем куба.
Подсказки¶
Убедитесь, что нормали поверхности меша обращены к частицам/точкам для правильного отклонения. Отрицательные масштабы объекта могут иметь аналогичный эффект. Обязательно пересчитайте нормали после применения масштаба.
Частицы волос реагируют непосредственно на силовые поля, поэтому, если вы используете силовое поле с коротким радиусом действия, вам не обязательно использовать «столкновения».
Частицы волос отклоняются от излучающих мешей, если вы редактируете их в режиме редактирования частиц. Таким образом, вы можете, по крайней мере, смоделировать волосы с помощью «столкновения».