Les membres¶
Ces types de rigs traîtent la génération de différents types de membres et de leurs caractéristiques, comme les doigts.
limbs.simple_tentacle¶
Créera une simple chaîne de tentacules d’os B flexibles et extensibles, qui peut éventuellement reproduire la rotation locale des os précédents aux os suivants pour une utilisation dans des cas comme les doigts.
Condition requise : Une chaîne d’au moins deux os connectés.
- Automation Axis (X, Y, Z, None)
Active l’automatisation sur l’axe sélectionné. Plusieurs axes (ou aucun) peuvent être sélectionnés en maintenant Maj-LMB. Si activé, les os de contrôle suivants copieront les rotations locales des précédentes. L’option est accessible dans les commandes du rig final en tant que contrainte de Copy Rotation (copie de rotation) et peut être désactivée même après la génération du rig ou au moment de l’animation.
- Assign Tweak Layers
Si activé, permet de placer les contrôles Tweak dans des collections d’os différentes des contrôles principaux.
limbs.super_finger¶
Créera une chaîne de doigt flexible et extensible avec un os de contrôle principal qui contrôle la rotation de toutes les articulations à travers son redimensionnement.
Condition requise : Une chaîne d’au moins deux os connectés.
- Bend Rotation Axis (Automatic, X, Y, Z, -X, -Y, -Z)
Définit l’axe de rotation automatique à lier au redimensionnement de l’os maître.
- B-Bone Segments (integer)
Définit le nombre de segments b-bone, pour la division de chaque tweak contrôle.
- IK Control
Génère un mécanisme IK très simple avec un seul contrôle.
IK commence son travail avec la forme du doigt définie par les commandes FK et l’ajuste pour que le bout du doigt touche la commande IK. Est conçu comme un outil permettant de maintenir temporairement le bout du doigt verrouillé sur une surface qu’il touche, plutôt que comme un système de pose complet.
Pour améliorer les performances, le parent commutable du contrôle CI ne contient qu’une seule option en dehors de None (Aucun). Il est donc conseillé d’ajouter un contrôle “held object” à l’aide du rig basic.raw_copy pour agir en tant que parent commun pour les doigts avec un commutateur parent entièrement fonctionnel.
- IK Local Location
Spécifie la valeur de l’option Local Location pour les contrôles IK, qui décide si les canaux d’emplacement sont alignés sur l’orientation ou le monde du contrôle local.
- Assign Tweak Layers
Si activé, permet de placer les contrôles Tweak dans des collections d’os différentes des contrôles principaux.
- Assign Extra IK Layers
Si activé, permet de placer le contrôle IK supplémentaire dans différentes collections d’os à partir des contrôles principaux.
Note
L’axe de rotation (Bend Rotation Axis dans le cas de limbs.super_finger) affecte le roulis des os générés. Le mode Automatique recalcule le roulis des os générés tandis que l’un des modes manuels copie le roulis des os du méta-rig.
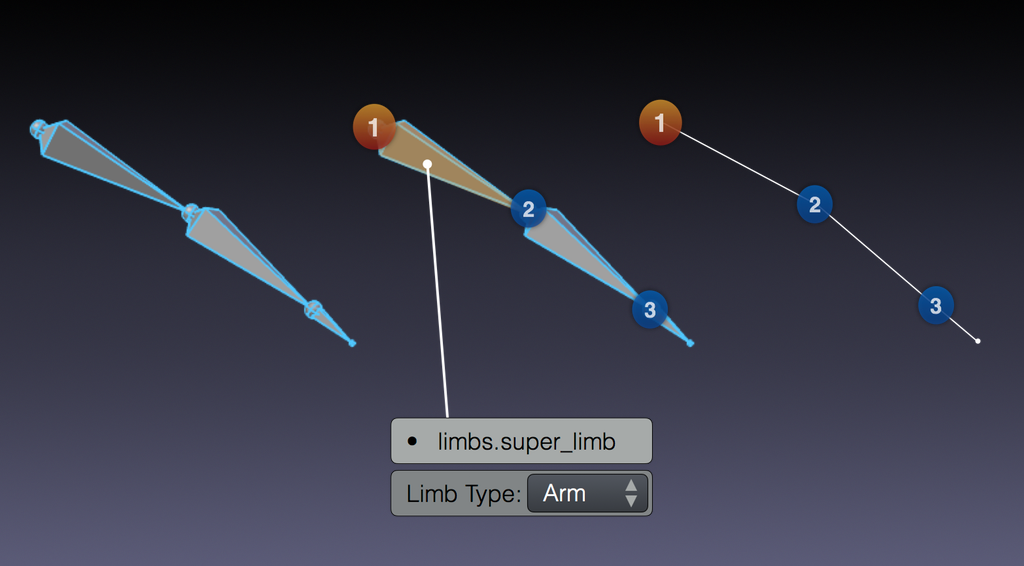
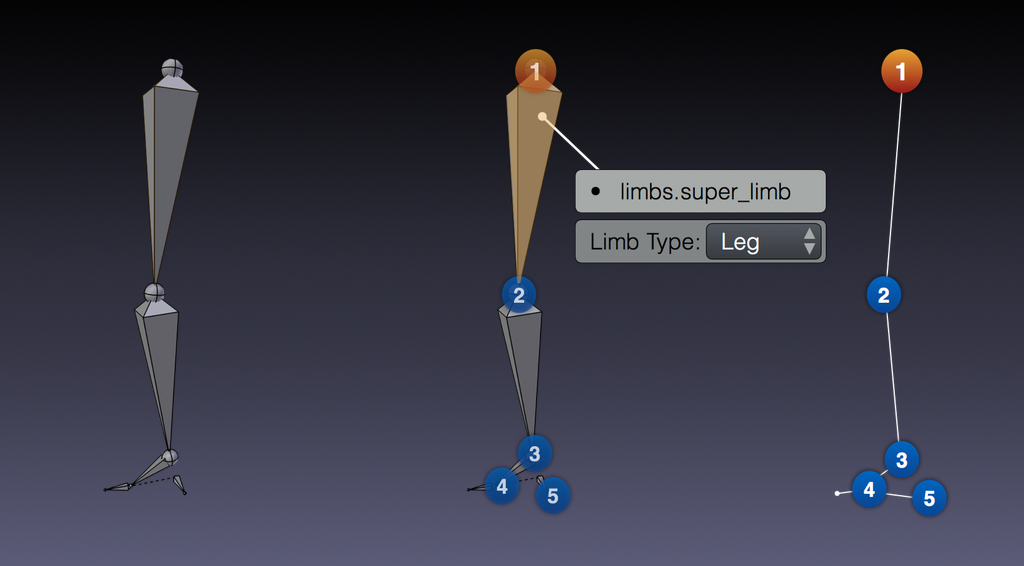
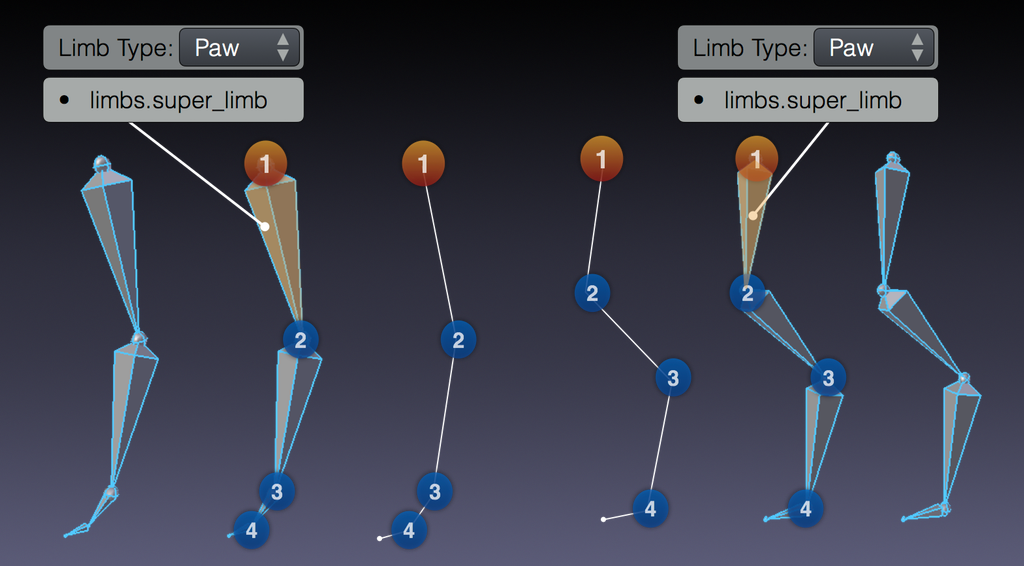
limbs.super_limb¶
Un wrapper de compatibilité ascendante autour de limbs.arm, limbs.leg et limbs.paw.
limbs.arm¶
Créera un bras flexible et extensible entièrement fonctionnel en fonction des options définies par l’utilisateur.
Condition requise : Une chaîne de trois os connectés (upper_arm (bras supérieur), forearm (avant-bras), hand (main)).
Os requis pour le bras.¶
- IK Wrist Pivot
Génère un enfant supplémentaire du contrôle IK de la main qui tourne autour de la queue de l’os de la main.
- Rotation Axis (Automatic, X, Z)
Définit l’axe de courbure de la chaîne CI. Les chaînes FK auront un degré de rotation totalement libre sur tous les axes.
- Limb Segments (integer)
Définit le nombre de contrôles de réglage supplémentaires que chaque os de membre aura sur le rig final.
- B-Bone Segments (integer)
Définit le nombre de segments b-bone, pour la division de chaque tweak contrôle.
- Custom IK Pivot
Génère un contrôle supplémentaire pour l’extrémité du membre IK qui permet de le faire pivoter autour d’un pivot placé arbitrairement.
- Assign FK Layers
Si activé, permet de placer la chaîne FK dans des collections d’os différentes des os IK.
- Assign Tweak Layers
Si activé, permet de placer les contrôles Tweak dans des collections d’os différentes des os IK.
limbs.leg¶
Créera une jambe flexible et extensible entièrement fonctionnelle en fonction des options définies par l’utilisateur.
Condition requise : Une chaîne de quatre os connectés (thigh, shin, foot, toe (cuisse, tibia, pied, orteil)) avec un enfant du pied non connecté à utiliser comme pivot du talon.
La jambe nécessite des os.¶
- Foot Pivot (Ankle, Toe, Ankle & Toe)
Spécifie où placer l’emplacement du pivot du contrôle IK principal ou s’il faut générer un contrôle de pivot supplémentaire à la base de la pointe.
- Separate IK Toe
Spécifie que deux contrôles de pointe distincts doivent être générés pour IK et FK au lieu de partager un seul os. Est nécessaire pour obtenir un accrochage IK-FK parfaitement correct dans toutes les poses possibles.
- Toe Tip Roll
Génère un curseur pour faire pivoter la commande du talon sur la pointe plutôt que sur la base de la pointe (pour le roulis, cela ne s’applique évidemment qu’au roulis vers l’avant).
- Rotation Axis (Automatic, X, Z)
Définit l’axe de courbure de la chaîne CI. Les chaînes FK auront un degré de rotation totalement libre sur tous les axes.
- Limb Segments (integer)
Définit le nombre de contrôles de réglage supplémentaires que chaque os de membre aura sur le rig final.
- B-Bone Segments (integer)
Définit le nombre de segments b-bone, pour la division de chaque tweak contrôle.
- Custom IK Pivot
Génère un contrôle supplémentaire pour l’extrémité du membre IK qui permet de le faire pivoter autour d’un pivot placé arbitrairement.
- Assign FK Layers
Si activé, permet de placer la chaîne FK dans des collections d’os différentes des os IK.
- Assign Tweak Layers
Si activé, permet de placer les contrôles Tweak dans des collections d’os différentes des os IK.
limbs.paw¶
Créera un bras flexible et extensible entièrement fonctionnel en fonction des options définies par l’utilisateur.
Condition requise : Une chaîne de quatre ou cinq os connectés (thigh, shin, paw, optional digit, toe) (cuisse, tibia, patte, doigt facultatif, orteil).
Os requis pour les pattes avant/arrière.¶
- Rotation Axis (Automatic, X, Z)
Définit l’axe de courbure de la chaîne CI. Les chaînes FK auront un degré de rotation totalement libre sur tous les axes.
- Limb Segments (integer)
Définit le nombre de contrôles de réglage supplémentaires que chaque os de membre aura sur le rig final.
- B-Bone Segments (integer)
Définit le nombre de segments b-bone, pour la division de chaque tweak contrôle.
- Custom IK Pivot
Génère un contrôle supplémentaire pour l’extrémité du membre IK qui permet de le faire pivoter autour d’un pivot placé arbitrairement.
- Assign FK Layers
Si activé, permet de placer la chaîne FK dans des collections d’os différentes des os IK.
- Assign Tweak Layers
Si activé, permet de placer les contrôles Tweak dans des collections d’os différentes des os IK.
limbs.front_paw¶
Dérivé de limbs.paw avec IK étendu adapté à une utilisation dans les pattes avant. L’IK supplémentaire limite le degré de changement de l’angle entre les os du tibia et de la patte (2e et 3e) lorsque la commande IK principale se déplace et tourne.
Pour de meilleurs résultats, le tibia ne doit pas être parallèle à la cuisse ou à la patte en position de repos, c’est-à-dire qu’il doit y avoir un certain degré de courbure dans toutes les articulations de la patte.
- Heel IK Influence
Influence de IK étendu. En cas de rotation complète, le contrôle IK principal ou l’os du doigt n’affectera pas la rotation de l’os de la patte, tandis que des valeurs inférieures permettent un certain mélange.
limbs.rear_paw¶
Dérivé de limbs.paw avec IK étendu adapté à une utilisation dans les pattes arrière. Le IK supplémentaire tente de maintenir les os de la cuisse et de la patte (1er et 3e) dans une orientation presque parallèle lorsque le contrôle IK principal se déplace et tourne.
Pour de meilleurs résultats, les os de la cuisse et de la patte doivent commencer presque parallèlement dans la pose de repos.
limbs.super_palm¶
Créera un système de paume basé sur la distance entre les os de la paume.
Condition requise : Au moins deux os enfant du même parent. La propriété doit être définie sur les os internes de la paume (pensez au métacarpe de l’index), le contrôle du rig apparaîtra sur le dernier os de la paume (pensez au métacarpe du petit doigt).
- Both Sides
Génère des contrôles des deux côtés de la paume, avec une influence sur les os internes mélangés entre eux.
- Primary Rotation Axis (X, Z)
Définit l’axe de rotation automatique à utiliser sur les os de la paume.
limbs.spline_tentacle¶
Ce type de rig implémente un tentacule flexible avec un système IK utilisant la contrainte Spline IK. Les os de contrôle définissent les points de contrôle d’une courbe de Bézier et la chaîne d’os suit la courbe.
Les points de contrôle de la courbe sont classés en trois groupes : début, milieu et fin. Les contrôles du milieu sont toujours visibles et actifs, tandis que les deux autres types peuvent être affichés et masqués dynamiquement à l’aide des propriétés; lorsqu’ils sont activés, ils apparaissent à côté de la commande permanente de début/fin correspondante et peuvent être déplacés à partir de là.
- Extra Start Controls
Spécifie le nombre de contrôles de démarrage facultatifs à générer.
- Middle Controls
Spécifie le nombre de contrôles intermédiaires à générer.
- Extra End Controls
Spécifie le nombre de contrôles de fin facultatifs à générer.
- Tip Control:
Spécifie le fonctionnement de l’étirement de la courbe et de l’os de contrôle final :
- Stretch To Fit
Étire toute la chaîne d’os pour l’adapter à la longueur de la courbe définie par les commandes.
Un contrôle de torsion d’extrémité est généré pour contrôler la torsion le long de la chaîne.
- Direct Tip Control
Génère un contrôle de fin IK, qui contrôle directement l’os final de la chaîne de la même manière que le fonctionnement IK régulier pour les membres, ainsi que la fin de la courbe de Bézier. Les os centraux de la chaîne s’étirent pour suivre la courbe et combler l’espace.
Le rig déduit automatiquement une torsion allant jusqu’à 180 degrés en fonction de l’orientation de la commande finale. Des quantités de torsion plus élevées doivent être réglées via un curseur End Twist Estimate pour éviter le retournement.
- Manual Squash & Stretch
Ce mode permet un contrôle manuel complet sur le redimensionnement de la chaîne, tandis que la chaîne couvre autant que possible de la courbe compte tenu de sa longueur actuelle.
Le contrôle de démarrage de la chaîne gère son redimensionnement uniforme de squash & de stretch, tandis que le contrôle de torsion de fin gère à la fois la torsion de la chaîne, ainsi que son échelle à la pointe (mélangée progressivement sur la longueur).
- Radius Scaling
Permet de mettre à l’échelle les commandes pour contrôler l’épaisseur de la chaîne à travers la courbe.
- Maximum Radius
Spécifie l’échelle maximale autorisée par la fonctionnalité Radius Scaling.
- FK Controls
Génère une chaîne de contrôle FK et un accrochage IK-FK.
- Assign FK Layers
Si activé, permet de placer la chaîne FK dans des collections d’os différentes des os IK.