Collision¶
Référence
- Mode:
Mode Objet
- Panneau:
Particules, Soft Bodies et Objets Cloth peuvent entrer en collision avecdes objets mesh. Les Boids essayent d’évider les objets Collision.
Vous pouvez limiter l’effet sur les particules à un groupe d’objets (dans le panneau Field Weights).
La deflexion des objets soft body est difficile, ils pénètrent souvent dans les objets qui entrent en collision.
Les particules de cheveux ignorent les objets qui défléchissent (mais vous pouvez les animer comme des soft bodies qui tiennent compte de la déflexion).
Si vous modifiez les paramètres de déflexion d’un objet, vous devez recalculer le système de particules, de corps mou ou de tissus par Delete Bake, cela ne se fait pas automatiquement.

Un objet collisionneur peut être temporairement désactivé via une bascule animable à droite du bouton qui l’active/désactive de façon permanente.
Options¶
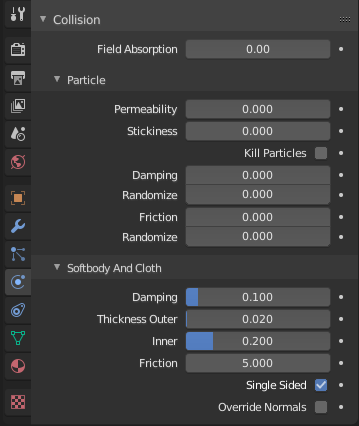
Panneau Collision.¶
Collision¶
- Field Absorption
Un déflecteur peut également dévier les effecteurs. Vous pouvez spécifier certains objets de collision/déflecteur qui dévient une partie spécifique de la force de l’effecteur en utilisant la valeur Field Absorption. Une absorption de 100 % signifie qu’aucune force ne traverse l’objet de collision/déflecteur. Si vous avez trois objets de collision l’un derrière l’autre avec par exemple 10%, 43% et 3%, l’absorption se situe autour de 50% \(100 × (1 - 0,1) × (1 - 0,43) × (1 - 0,03)\).
Particle¶
- Permeability
Fraction de particules passant à travers le maillage.
- Stickiness
La quantité de particules qui adhèrent à l’objet.
- Kill Particles
Supprime les particules lors de l’impact.
- Damping (amortissement)
Amortissement lors d’une collision (indépendant de la vitesse des particules).
- Randomize
Variation aléatoire de l’amortissement.
- Friction
Friction lors des mouvements à la surface.
- Randomize
Variation aléatoire de la friction.
Soft Body and Cloth¶
Il est également important de noter que ce panneau de collision est utilisé pour indiquer à toutes les simulations que cet objet doit participer à la collision/déviation d’autres objets sur une couche partagée (particules, soft bodies et tissu).
Note
La forme de l’objet déforme le tissu, de sorte que la simulation de tissu doit être saisie dans la “vraie” forme de cet objet maillé sur ce cadre. Cette forme vraie est la forme de base telle que modifiée par des clés de forme ou des armatures. Par conséquent, le modificateur Collision doit être après l’un d’entre eux. L’image ci-dessous montre le panneau Modificateurs pour l’objet maillage Personnage (et non l’objet tissu).

Pile de Collision.¶
- Damping (amortissement)
Amortissement lors d’une collision. La quantité de rebond que les surfaces auront.
0.0 - Pas d’amortissement, les soft bodies auront un rebondissement maximal.
1.0 - Amortissement maximal, les soft bodies ne rebondissent pas du tout.
- Thickness
Une distance de remplissage est ajoutée à l’intérieur et à l’extérieur de chaque face, pour aider à prévenir les intersections. Le corps mou s’immobilisera à cette distance, loin de la face de l’objet qui entre en collision. L’extérieur et l’intérieur sont définis par la normale à la face, représentée par une flèche bleue dans la figure Un sommet de soft body entrant en collision avec un plan..
- Outer
Taille de la zone de collision extérieure.
- Inner
Taille de la zone de collision intérieure (distance de remplissage).
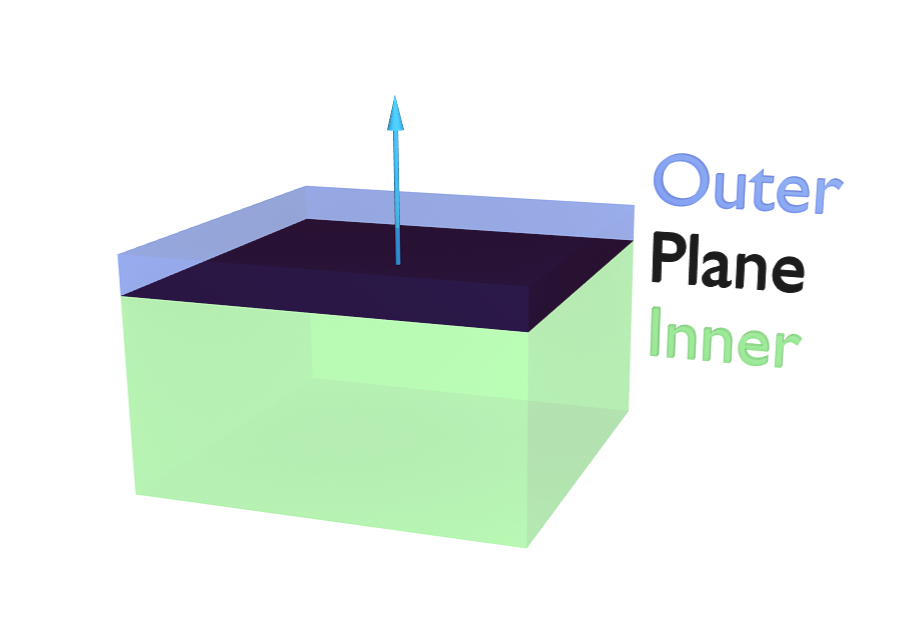
Un sommet de soft body entrant en collision avec un plan.¶
- Friction
Coefficient indiquant à quel point le tissu est glissant lorsqu’il entre en collision avec lui-même. Par exemple, la soie a un coefficient de frottement plus faible que le coton.
- Single Sided
Si activé, le collisionneur est considéré comme représentant la limite d’un objet solide plutôt qu’une surface mince et éjecte l’intersection du tissu dans la direction de sa normale.
- Override Normals
Lorsque l’option est activée, les impulsions de collision du tissu agissent dans le sens des normales du collisionneur.
Note
Les collisions de Soft body (corps mous) sont difficiles à rendre parfaitement. Si l’un des objets se déplace trop vite, le corps mou pénètre dans le maillage. Voir aussi la section concernant Soft Bodies.
Exemples¶

Particules déviées.¶
Voici un objet Meta, utilisant Instancing Vertices sur un système de particules émettant vers le bas et dévié par un maillage cube.
Astuces¶
Assurez-vous que les normales de la surface du maillage sont orientées vers les particules/points pour une déflexion correcte. Des échelles négatives sur l’objet peuvent avoir un effet similaire. Assurez-vous de recalculer les normales après avoir appliqué l’échelle.
Les particules de cheveux réagissent directement aux champs de force, donc si vous utilisez un champ de force de courte portée, vous n’avez pas nécessairement besoin d’une collision.
Les particules de cheveux évitent leur maillage émetteur si vous les éditez en Mode d’édition des particules. Vous pouvez donc au moins modéliser les cheveux avec collision.