Vynútenie Transformácia¶
Toto vynútenie je zložitejšie a univerzálnejšie ako ostatné vynútenia „transformácie“. Umožňuje vám nastaviť polohu, rotáciu alebo mierku objektu/kosti na základe polohy, rotácie alebo mierky iného objektu, pričom môžete miešať a spájať osi podľa vlastného uváženia. Príkladom môže byť nastavenie rotácie X kolesa na základe súradnice Y koľajnice vedľa neho.
Vynútenie pracuje s rozsahmi vstupných a výstupných hodnôt, jedným pre každú os. Najprv upne vstupnú hodnotu do rozsahu Mapovať od a potom ju posunie a zmení mierku do príslušného rozsahu Mapovať do. To umožňuje napríklad mapovať súradnicu Y v rozsahu (-3 m, 3 m) na rotáciu X v rozsahu (0, 180°).
Možnosti¶
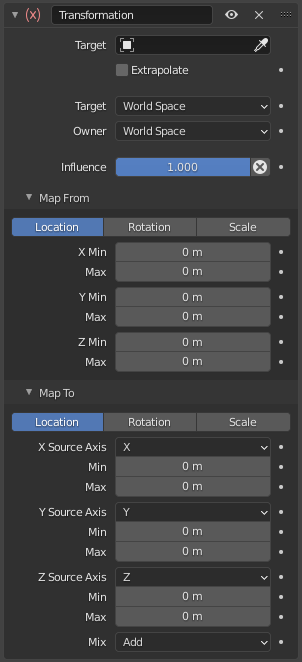
Vynútenie Transformácia.¶
- Cieľ
Objekt alebo kosť na načítanie transformácie.
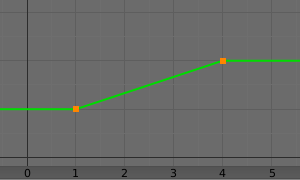
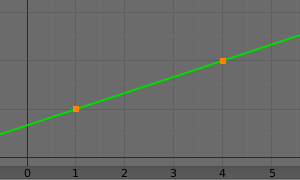
- Extrapólovať
Predvolene sú vstupné a výstupné hodnoty pripnuté na hodnoty Min/Max. Keď povolíte funkciu Extrapólovať, je povolené prekročiť tieto hranice. To je znázornené na grafoch nižšie, kde os X predstavuje vstup (Mapovať Od nastavená na Min = 1 a Max = 4) a os Y predstavuje výstup (Mapovať Do nastavená na Min = 1 a Max = 2).
- Cieľ/Vlastník
Priestory na načítanie transformácie z cieľa a na jej použitie na vlastníka.
- Vplyv
Ako silno vynútenie ovplyvňuje vlastníka.
Priradiť z¶
Transformácia na načítanie z cieľa.
- Poloha, Rotácia, Mierka
Typ transformácie na čítanie.
- Režim Rotácia
Typ rotácie, ktorý sa má použiť, vrátane rôznych Eulerovho usporiadania, kvarteriónov a iných režimov rotácie kanálov. Predvolene sa používa Eulerovo usporiadanie vlastníka vynútenia.
V režime Kvaternión sa kanály konvertujú na vážené uhly rovnakým spôsobom ako uhly výkyvu v režimoch Výkyv a Zakrútenie X/Y/Z.
- X/Y/Z Min, Max
Rozsah vstupných hodnôt pre každú os.
Namapovať na¶
Transformácia, ktorá sa má uplatniť na vlastníka.
- Poloha, Rotácia, Mierka
Typ transformácie, ktorá sa má použiť.
- Usporiadanie Rotácia
Určuje, ktoré Eulerovo usporiadanie použiť. Predvolené nastavenie je usporiadanie vlastníka vynútenia.
- Zdrojová os X/Y/Z
Pre každú z troch výstupných osí umožňuje vybrať vstupnú os, z ktorej má prevziať svoju hodnotu. Tú istú vstupnú os môžete vybrať viackrát.
- Min, Max
Rozsah výstupných hodnôt pre každú os.
- Zmiešať
Určuje, ako sa výsledok vynútenia kombinuje s existujúcou transformáciou. Súbor dostupných možností sa líši v závislosti od typu transformácie.
- Nahradiť
Výsledok vynútenie nahradí existujúcu transformáciu.
- Vynásobiť Mierku
Nové hodnoty sa vynásobia existujúcimi hodnotami osi.
- Pripočítať Polohu Rotáciu
Nové hodnoty sa pripočítajú k existujúcim hodnotám osi.
- Pred pôvodnou Rotáciou
Nová rotácia sa pridá pred existujúcu rotáciu, ako keby bola použitá na rodiča vlastníka vynútenia.
- Po pôvodnej Rotácii
Nová rotácia sa pridá za existujúcu rotáciu, ako keby bola použitá na potomka vlastníka vynútenia.
Poznámka
Z historických dôvodov je predvolené nastavenie režimu Zmiešať na Spočítať pre polohu a rotáciu a Nahradiť pre mierku.
Ak sa ako vstup použije na rotáciu cieľa, nech sú skutočné hodnoty akékoľvek, vynútenie ich vždy „vráti“ do rozsahu (-180 až 180). Napr. ak má cieľ rotáciu 420 stupňov okolo osi X, hodnoty použité ako vstup X vynútením budú:
\(((420 + 180) modulo 360) - 180 = 60 - 180 = -120\)
Toto vynútenie sa preto v skutočnosti nehodí na transformáciu objektu na základe rotácie ozubeného kolesa. Rotácia ozubeného kolesa na základe transformácie objektu však funguje dobre.
Podobne pri použití vlastností transformácie mierky cieľa ako vstupu, nech sú skutočné hodnoty akékoľvek, vynútenie vždy prevezme ich absolútne hodnoty (t. j. invertuje záporné hodnoty).
Ak je hodnota Min vyššia ako jej zodpovedajúca hodnota Max, obe sa považujú za rovné hodnote Max. To znamená, že nemôžete vytvárať „obrátené“ mapovania.
Napríklad¶
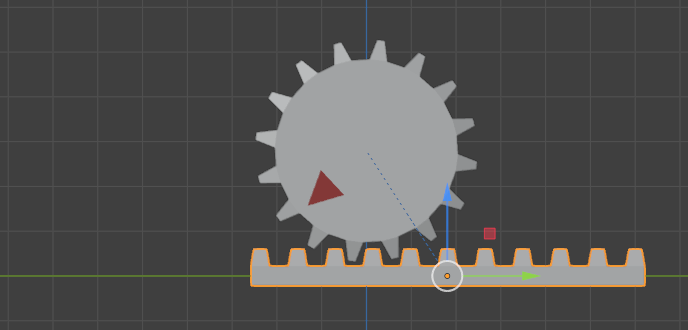
V nasledujúcom príklade pridáme k ozubenému kolesu vynútenie, ktoré nastaví jeho rotáciu X na základe polohy Y koľajnice:
Cieľ: Železničný objekt
Mapovať od: Poloha
Y Min: -3m
Y Max: 3m
Mapovať do: Rotácia
Zdrojová os X: Y
X Min: 0°
X Max: 180°
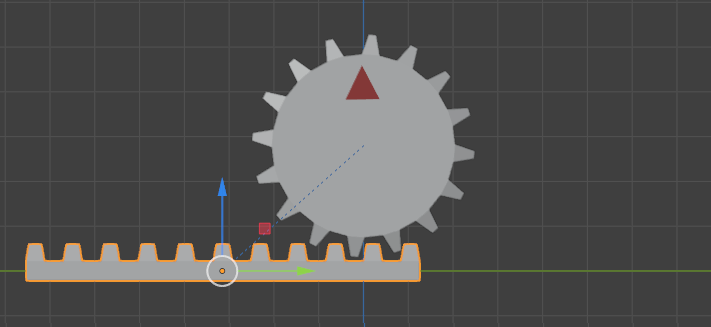
Pred posunom koľajnice.¶
Po posune koľajnice.¶
V predvolenom nastavení sa ozubené koleso prestane otáčať, ak sa koľajnica dostane mimo rozsah (-3m, 3m). Môžete zapnúť funkciu Extrapólovať, aby ste to zmenili.