Štruktúra krivky¶
Drážky¶
Drážky sú základnými zložkami objektov kriviek, ktoré definujú ich tvary. Objekt krivky môže pozostávať z viacerých drážok, podobne ako objekt povrchovej siete môže obsahovať viacero nespojitých sietí. Tvar každej drážky je určený jeho riadiace body. Drážky sa vyskytujú v niekoľkých typoch: Polygonálne, Bézierove a NURBS, pričom každý z nich má vlastný algoritmus na reprezentáciu kriviek, ako je opísané v časti Typy drážok.
Drážky majú jedinečné vlastnosti, ktoré možno upraviť v režime editácie na paneli Aktívna drážka.
Riadiace body¶
Drážky sa skladajú z riadiacich bodov, ktoré sa spájajú a vytvárajú drážku. Riadiace body možno vyberať a transformovať na úpravu tvaru drážky. Je to obdoba vrcholov v objekte povrchovej siete.
Viď aj
Typy drážok¶
Polygonálna¶
Polygonálne drážky sú najjednoduchším typom bez interpolácie medzi riadiacimi bodmi. Používajú sa pri konverzii sietí na krivky na presné zobrazenie pôvodnej siete. Zatiaľ čo Polygonálne drážky sú presné, Bézierove alebo NURBS drážky sa vo všeobecnosti uprednostňujú pre hladké krivky.
Bézierova krivka¶
Bézierove drážky používajú na definovanie svojho tvaru riadiace body a manipulátory. Úsek krivky sa nachádza medzi dvoma riadiacimi bodmi, pričom manipulátory riadia zakrivenie.
Na obrázku nižšie sú riadiace body v strede ružových čiar, zatiaľ čo manipulátory sa rozširujú smerom von. Šípky predstavujú normály krivky, ktoré označujú smer a sklon.
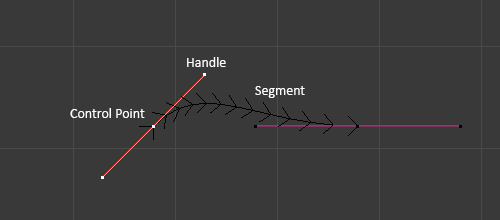
Bézierova krivka v režime editácie.¶
Typy manipulátorov¶
Bézierove krivky podporujú štyri typy manipulátorov, ktoré možno meniť pomocou V:
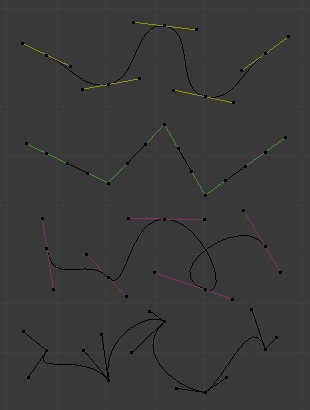
Typy manipulátorov bézierovej krivky.¶
- Automaticky:
Automaticky nastavuje dĺžku a smer manipulátora pre čo najplynulejšie zakrivenie. Zobrazujú sa ako žlté manipulátory. Po presunutí sa konvertuje na Zarovnané.
- Vektor:
Manipulátory smerujú priamo k susedným riadiacim bodom, čo umožňuje vytvárať rovné čiary alebo ostré rohy. Zobrazujú sa ako zelené manipulátory. Po premiestnení sa konvertuje na Voľné.
- Zarovnané:
Manipulátory zostávajú v priamej línii, čo zaručuje hladké a plynulé krivky. Zobrazené ako fialové manipulátory.
- Voľné:
Manipulátory sa pohybujú nezávisle, čo umožňuje asymetrické zakrivenie. Zobrazené ako čierne manipulátory.
Poznámka
Keď je vybraný riadiaci bod, jeho manipulátory sú zvýraznené červenou farbou, čím sa zmení ich obvyklá farba. Napríklad vektorové manipulátory (normálne zelené) sa po výbere zobrazia žlto, čo sa môže zameniť s automatickými manipulátormi.
Ak chcete tento efekt zakázať, upravte nastavenia farieb v položke časti Motív v ponuke Predvoľby.
NURBS¶
NURBS (Non-Uniform Rational B-Splines) sú matematicky presné drážky, ktoré ponúkajú presné tvary. Na rozdiel od Bézierových kriviek, ktoré aproximujú tvary (napr. Bézierova kružnica aproximuje dokonalý kruh), NURBS môžu reprezentovať presnú geometriu.
Viac informácií nájdete na stránke Wikipédie <https://en.wikipedia.org/wiki/NURBS>`__.
Riadiace body NURBS majú jedinečnú váhovú vlastnosť, ktorá určuje ich vplyv na krivku. Táto váha sa líši od cieľovej váhy používanej v simuláciách mäkkých telies. Váhy sa dajú nastaviť v poli W na paneli Transformácia.
Poznámka
Ak majú všetky riadiace body rovnakú váhu, ich vplyvy sa vyrušia. Rozdiely vo váhe spôsobujú, že sa krivka posúva smerom k určitým riadiacim bodom alebo od nich.