Кінцівки¶
Ці типи оснащення впораються з генерацією різних типів кінцівок та їх рис, таких як пальці.
limbs.simple_tentacle¶
Створить звичайні гнучкі та ті, що розтягуються ланцюги b-bones(кісток) щупальця, які можуть опціонально копіювати місцеві обертання з попередніх кісток до тих, що є наступними, для використання в таких наприклад випадках, як для пальців.
Необхідна умова: Ланцюг, щонайменше з двох з’єднаних кісток.
- Автоматизовані Вісі (X, Y, Z, Нічого)
Вмикає автоматизацію обраних осей. Багато осей або ніякі, можуть бути обрані тримаючи Shift-LMB. Коли увімкнено, наступні елементи керування кістки скопіюють локальні обертання з попередніх кісток. Опція є доступною в елементах керування фінального оснащення, як обмеження Скопіювати Обертання та може бути вимкнено навіть після того як оснащення було згенеровано, або під час анімації.
- Назначити Шари Підлаштування
Якщо увімкнено, дозволяє розмістити елементи керування Підлаштування в колекції різних кісток з основного елементу керування.
limbs.super_finger¶
Створить гнучкий та ланцюг що розтягує палець з майстер елементом керування кістки, який керує обертанням усіх суглобів через свій масштаб.
Необхідна умова: Ланцюг, щонайменше з двох з’єднаних кісток.
- Вісі Згинання Обертання (Автоматична, X, Y, Z, -X, -Y, -Z)
Визначає з’єднання осей автоматичного обертання до масштабу майстер кістки.
- B-Bone Сегмент (цифра)
Визначає число b-bone сегментів на які кожне підлаштування контролю буде розділено.
- IK Елемент Керування
Генерує дуже простий IK механізм тільки з одним елементом керування.
IK Розпочинає свою роботу з фігурою пальця визначеного FK елементом керування та підлаштовує його так, щоб кінчик пальця торкався IK елементу керування. Він спроектований як інструмент, щоб тимчасово тримати кінчик пальця приєднаним до поверхні до якої він торкається, а не використовуючи повнофункціональну систему позування.
Для покращення продуктивності, предок який може перемикатись для IK елементу керування, містить тільки одну опцію крім Нічого. Таким чином є порада, додати елемент керування „утримуваний об’єкт“ використовуючи basic.raw_copy оснащення, щоб діяти як звичайний предок для пальців з повнофункціональним перемикачем предка.
- IK Локальне Місце
Вказує значення опцій Локального Місця для IK елементу керування, який вирішує чи канали місця є вирівняними до локального елементу керування орієнтацією або до світу.
- Назначити Шари Підлаштування
Якщо увімкнено, дозволяє розмістити елементи керування Підлаштування в колекції різних кісток з основного елементу керування.
- Назначити Додаткові IK Шари
Якщо увімкнено, дозволяє розмістити додаткові IK елементи керування в різні колекції кісток з основних елементів керування.
Примітка
Вісі Обертання (Вісі Згинання Обертання у випадку limbs.super_finger) впливають на the оберт згенерованих кісток.
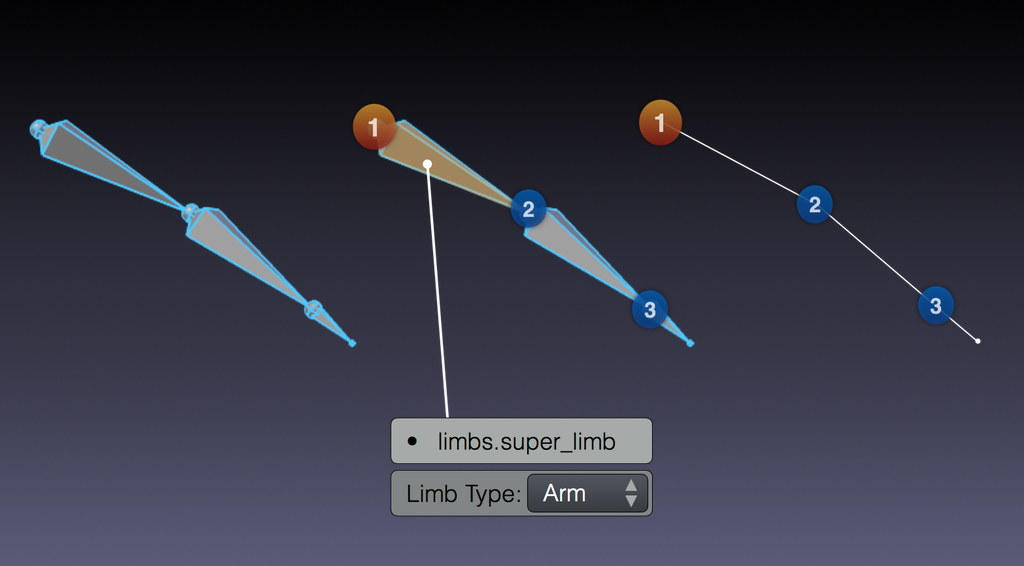
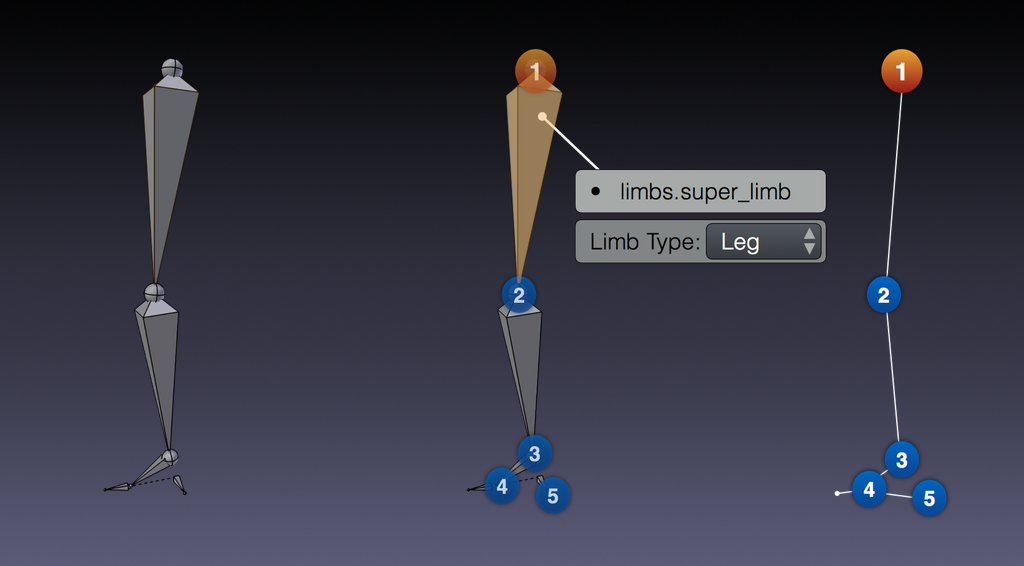
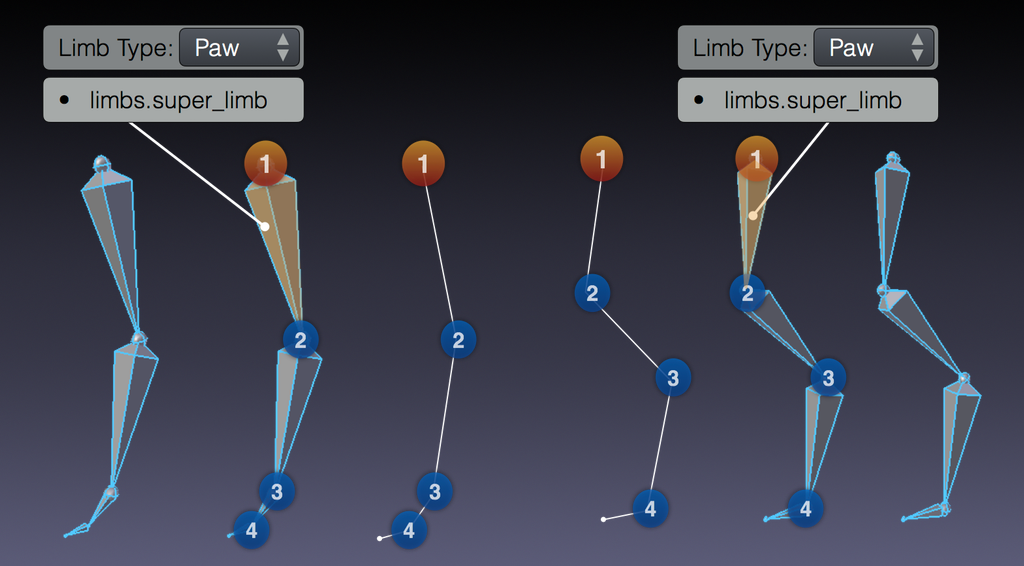
limbs.super_limb¶
Обгортка зворотної сумісності навколо limbs.arm, limbs.leg and limbs.paw.
limbs.arm¶
Створить повнофункціональну руку, що може згинатись та розтягуватись в залежності від обраних користувачем опцій.
Вимога: Ланцюг трьох з’єднаних кісток (плече, передпліччя, рука).
Рука потребує кісток.¶
- Вісь Обертання IK Зап’ястя
Генерує додаткового нащадка IK елементу керування руки яка обертається навколо хвоста кістки руки.
- Вісі Обертання (Автоматична, X, Z)
Визначає вісі згинання для IK ланцюгу. FK ланцюг буде мати повністю вільний кут обертання на всіх осях.
- Сегменти Кінцівки (цифра)
Визначає число додаткового підлаштування елементів керування, кожна кістка кінцівки буде мати одне фінальне оснащення.
- B-Bone Сегмент (цифра)
Визначає число b-bone сегментів на які кожне підлаштування контролю буде розділено.
- Кастомізована IK Вісь Обертання
Генерує додатковий елемент керування для кінця IK кінцівки, який дозволяє обертати її навколо довільно розміщеної вісі обертання.
- Назначити FK Шари
Якщо увімкнено, дозволяє розмістити FK ланцюг в різних колекціях кісток з IK кістки.
- Назначити Шари Підлаштування
Якщо увімкнено, дозволяє розмістити Підлаштування елементів керування в різних колекціях кісток з IK кісток.
limbs.leg¶
Створить повнофункціональну ногу яка може згинатись та розтягуватись в залежності від обраних користувачем опцій.
Вимога: Ланцюг з чотирьох з’єднаних кісток (стегно, гомілка, ступня, палець ноги) з одним не з’єднаним нащадком ступні, що буде використаний для вісі обертання п’яти.
Кістки які потрібні нозі.¶
- Вісь Обертання Стопи (Щиколотка, Палець Ноги, Щиколотка та Палець Ноги)
Вказує де розмістити місце вісі обертання основного IK елементу керування, або згенерувати додатковий елемент керування віссю обертання на основі пальцю ноги.
- Окремий IK Палець Ноги
Вказує, що два окремих елемента керування пальцем ноги повинні бути згенеровані для IK та FK, натомість від використання однієї кістки. Це є потрібно, щоб отримати повність правильне IK-FK від’єднання в усіх можливих позах.
- Оберт Кінчика Пальця Ноги
Генерує повзунок, щоб перемикати елемент керування п’яти до вісі обертання на кінчику, натомість від основи пальцю ноги (для оберту є зрозумілим, що це тільки призначено для переднього оберту).
- Вісі Обертання (Автоматична, X, Z)
Визначає вісі згинання для IK ланцюгу. FK ланцюг буде мати повністю вільний кут обертання на всіх осях.
- Сегменти Кінцівки (цифра)
Визначає число додаткового підлаштування елементів керування, кожна кістка кінцівки буде мати одне фінальне оснащення.
- B-Bone Сегмент (цифра)
Визначає число b-bone сегментів на які кожне підлаштування контролю буде розділено.
- Кастомізована IK Вісь Обертання
Генерує додатковий елемент керування для кінця IK кінцівки, який дозволяє обертати її навколо довільно розміщеної вісі обертання.
- Назначити FK Шари
Якщо увімкнено, дозволяє розмістити FK ланцюг в різних колекціях кісток з IK кістки.
- Назначити Шари Підлаштування
Якщо увімкнено, дозволяє розмістити Підлаштування елементів керування в різних колекціях кісток з IK кісток.
limbs.paw¶
Створить повнофункціональну лапу, яка може згинатись та розтягуватись в залежності від обраних користувачем опцій.
Вимога: Ланцюг з чотирьох або п’яти з’єднаних кісток (стегно, гомілка, лапа, опціонально цифра, палець ноги).
Передні/Задні лапи потребують кісток.¶
- Вісі Обертання (Автоматична, X, Z)
Визначає вісі згинання для IK ланцюгу. FK ланцюг буде мати повністю вільний кут обертання на всіх осях.
- Сегменти Кінцівки (цифра)
Визначає число додаткового підлаштування елементів керування, кожна кістка кінцівки буде мати одне фінальне оснащення.
- B-Bone Сегмент (цифра)
Визначає число b-bone сегментів на які кожне підлаштування контролю буде розділено.
- Кастомізована IK Вісь Обертання
Генерує додатковий елемент керування для кінця IK кінцівки, який дозволяє обертати її навколо довільно розміщеної вісі обертання.
- Назначити FK Шари
Якщо увімкнено, дозволяє розмістити FK ланцюг в різних колекціях кісток з IK кістки.
- Назначити Шари Підлаштування
Якщо увімкнено, дозволяє розмістити Підлаштування елементів керування в різних колекціях кісток з IK кісток.
limbs.front_paw¶
Похідна від limbs.paw з розширеним IK, підходить до використання для передніх лап. Додаткові IK, лімітують ступінь зміни в куті між кістками гомілки та лапи (другий та третій) як основний IK елемент керування рухається та обертається.
Для кращих результатів, кістка гомілки не повинна бути паралельною до стегна або лапи в позі відпочинку, тобто повинна бути якась ступінь згинання в усіх суглобах лапи.
- Вплив IK П’яти
Вплив розширеного IK. При повному обертані основний IK елемент керування або цифрова кістка не буде впливати на обертання кістки лапи, коли нижчі значення вносять деякі змішування.
limbs.rear_paw¶
Похідна від limbs.paw з розширеним IK, підходить до використання для задніх лап. Додатковий IK пробує утримувати кістки (перша та третя) стегна та лапи в майже паралельній орієнтації, коли основний IK елемент керування рухається та обертається.
Для кращих результатів, кістки стегна та лапи, повинні починатись майже паралельно в позі відпочинку.
limbs.super_palm¶
Створить систему долоні засновану на дистанцій між кістками долоні.
Вимога: Не менше ніж дві кістки нащадка від одного предка. Властивість повинна бути встановлена на внутрішню частину кісток долоні (думайте про це, як про мета-зап’ясток вказівного пальцю), з’явиться елемент керування оснащення на останній кістці долоні (думайте про це, як про мета-зап’ясток мізинчику).
- Обидві Сторони
Генерує елементи керування з обох сторін долоні, з впливом на внутрішні кістки які змішались між ними.
- Вісі Первинного Обертання (X, Z)
Визначає вісі автоматичного обертання, що будуть використані на кістках долоні.
limbs.spline_tentacle¶
Тип оснащення імплементує гнучке щупальце з IK системою використовуючи обмеження IK Комбінації Кривих. Керовані кістки визначають контрольні точки кривої Безьє, і ланцюг кістки слідує за кривою.
Контрольні точки кривої посортовані на три групи: початкові, середині та кінцеві. Середні елементи керування завжди видимі та активні, коли інші два типи можуть бути відображені і сховані динамічно використовуючи властивості; коли вони з’являються навпроти з відповідним постійним початковим/кінцевим елементом керування та можуть бути переміщені звідти.
- Додаткові Початкові Елементи Керування
Вказує опціональне число початкових елементів керування які треба згенерувати.
- Середні Елементи Керування
Вказує число середніх елементів керування які треба згенерувати.
- Додаткові Кінцеві Елементи Керування
Вказує опціональне число кінцевих елементів керування які треба згенерувати.
- Елемент Керування Кінчиком:
Вказує як крива розтягується і як фінальний елемент керування кісткою працює:
- Розтягнення Для Розміщення
Розтягує увесь ланцюг кістки, щоб помістити довжину кривої визначеною елементами керування.
Кінцевий елемент керування крутінням згенерований, щоб керувати крутінням по всьому ланцюгу.
- Пряме Керування Кінчиком
Генерує кінцевий IK елемент керування, який напряму керує фінальною кісткою ланцюгу, так само як регулярний IK працює з кінцівками, а також як контролюється кінець кривої Безьє. Середні кістки ланцюгу розтягуються, щоб слідувати кривій і прикрити проміжок.
Оснащення автоматично виводить крутіння аж до 180 градусів засновуючись на орієнтації кінцевого елементу керування. Велика частка крутіння має набрати шкалу через повзунок Оцінювач Кінцевого Крутіння, щоб оминути переворот.
- Ручне Розчавлення та Розтягування
Цей режим дозволяє повний ручний контроль через масштабування ланцюга, поки ланцюг перекриває криву як може, тому як, він може надати їй наявну довжину.
Початковий елемент керування ланцюга керує його одноманітним масштабуванням розчавлення та крутіння, поки елемент керування кінцевим крутінням керує обома крутіннями ланцюга, а також масштабом їх кінчика (змішаний поступово протягом всієї довжини).
- Масштабування Радіуса
Дозволяє масштабування елементів керування, щоб керувати товщиною ланцюга через криву.
- Максимальний Радіус
Вказує максимальний масштаб, дозволений функцією Масштабування Радіуса.
- FK Елементи Керування
Генерує FK елемент керування ланцюга і роз’єднання IK-FK.
- Назначити FK Шари
Якщо увімкнено, дозволяє розмістити FK ланцюг в різних колекціях кісток з IK кістки.