Зіткнення – Collisions¶
Посилання
- Панель:
«Фізика > Тверде Тіло > Зіткнення» –
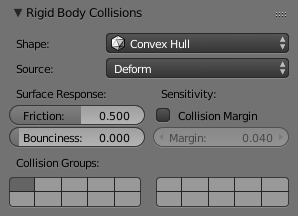
Rigid Body Collisions panel.¶
- Форма
Determines the collision shape of the object; these can be broken into two categories: primitive shapes and mesh based shapes.
Primitive shapes (Box, Sphere, Capsule, Cylinder, and Cone) are best in terms of memory and performance but do not necessarily reflect the actual shape of the object. The size of the shape is calculated based on the object’s bounding box. The center of gravity is always in the geometric center of the shape. Primitive shapes can be shown in the 3D Viewport by enabling Extras Overlay.
Mesh based shapes (Convex Hull and Mesh) are calculated based on the geometry of the object so they are a better representation of the object. The center of gravity for these shapes is the object origin.
- Box – Коробка:
Box-like shapes (e.g. cubes), including planes (e.g. ground planes). The size per axis is calculated from the bounding box.
- Sphere – Сфера:
Sphere-like shapes. The radius is the largest axis of the bounding box.
- Капсула – Capsule:
Направлено уверх по осі Z.
- Cylinder – Циліндр:
Направлено уверх по осі Z. The height is taken from the Z axis, while the radius is the larger of the X or Y axes.
- Cone – Конус:
Направлено уверх по осі Z. The height is taken from the Z axis, while the radius is the larger of the X or Y axes.
- Опукла Оболонка – Convex Hull:
A mesh-like surface encompassing (e.g. shrink-wrapped over) all vertices (best results with fewer vertices). A convex approximation of the object, which has good performance and stability.
- Mesh – Сіть:
Mesh consisting of triangles only, allowing for more detailed interactions than convex hulls. Allows simulating concave objects, but is rather slow and unstable.
- Compound Parent:
Takes the collision shapes from the object’s children and combines them. This makes it possible to create concave shapes from primitive shapes. This usually results in a faster simulation than the Mesh collision shape while also being generally more stable.
- Source – Джерело
Source of the mesh used to create the collision shape.
- Base – База:
Базова сіть об’єкта.
- Deform – Деформа:
Включає будь-які деформації, додані для сіті (ключі форм, модифікатори деформи).
- Фінальне – Final:
Включає усі деформації та модифікатори.
- Деформування – Deforming
Сітьові форми можуть деформуватися у ході симуляції.
Реагування Поверхні – Surface Response¶
- Тертя – Friction
Resistance of object to movement. Specifies how much velocity is lost when objects collide with each other.
- Відскокність – Bounciness
Tendency of object to bounce after colliding with another (0 to 1) (rigid to perfectly elastic). Specifies how much objects can bounce after collisions.
Чутливість – Sensitivity¶
The collision margin is used to improve the performance and stability of rigid bodies. Depending on the shape, it behaves differently: some shapes embed it, while others have a visible gap around them.
Припуск вбудовується для таких форм:
Sphere – Сфера
Box – Коробка
Капсула – Capsule
Cylinder – Циліндр
Опукла Оболонка – Convex Hull: Вбудовування дозволяється тільки для однорідно масштабованих об’єктів.
Припуск не вбудовується для таких форм:
Cone – Конус
Активна Трибічна Сіть – Active Triangle Mesh
Пасивна Трибічна Сіть – Passive Triangle Mesh: Може бути задана в 0 у більшості часу.
- Припуск – Margin
Threshold of distance near the surface where collisions are still considered (best results when nonzero).
Collections – Колекції¶
Дозволяє зіткнення твердих тіл розподіляти по різних групах (максимум 20).